JUKE

名前の由来は,チームリーダーが好きだった車,日産「Juke」と,アメフトの競技用語で「相手を軽快にかわす」という意味の「Juke」をかけてこの名前になりました.
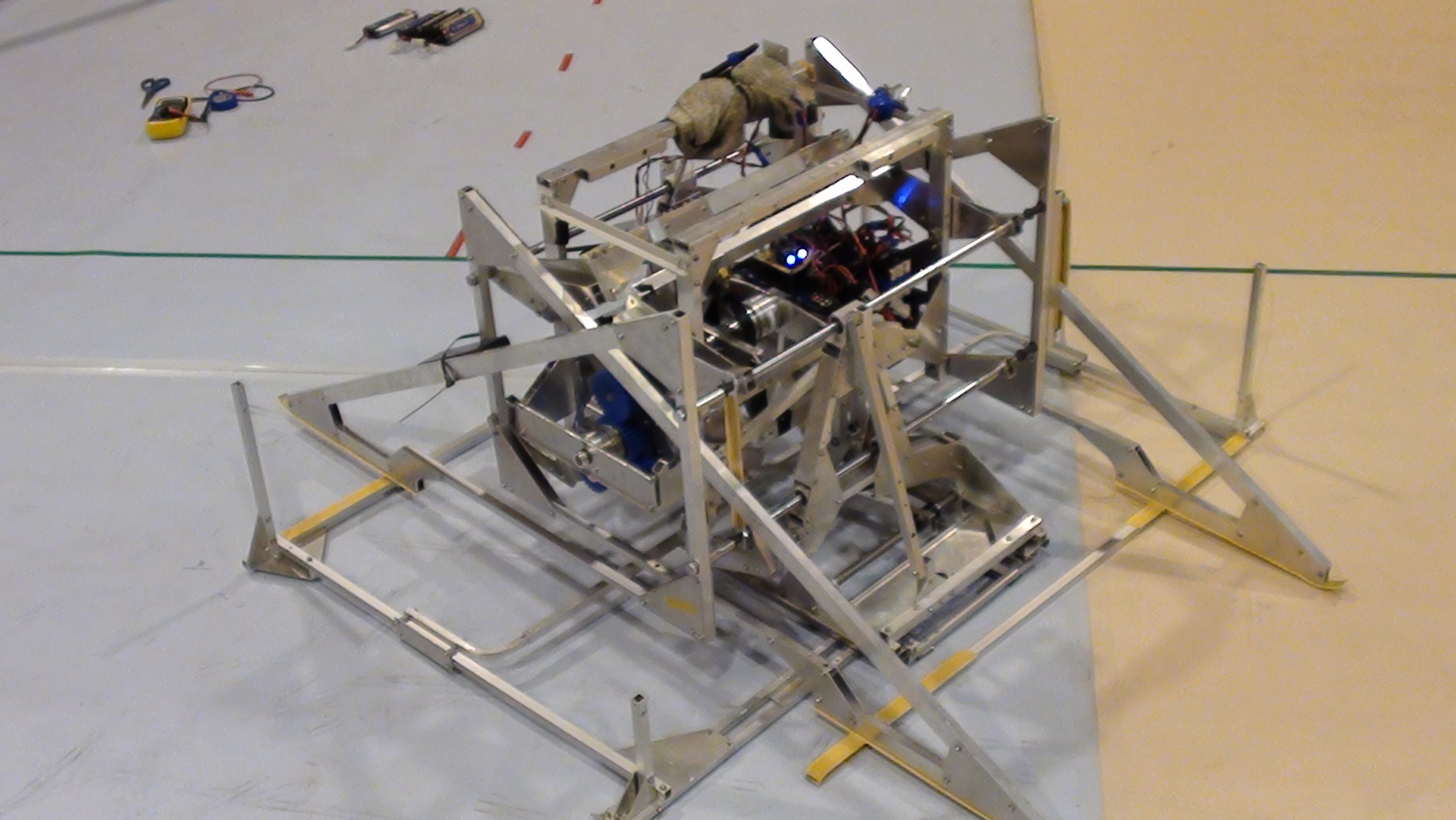
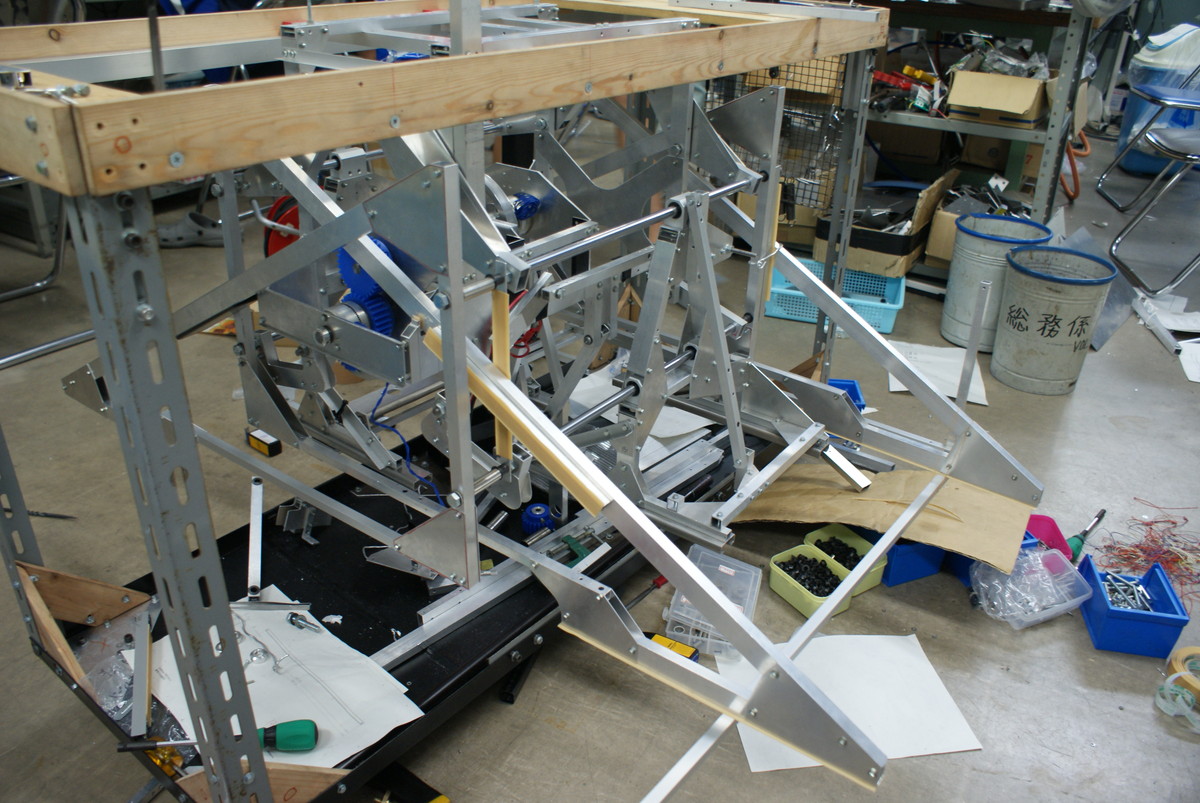
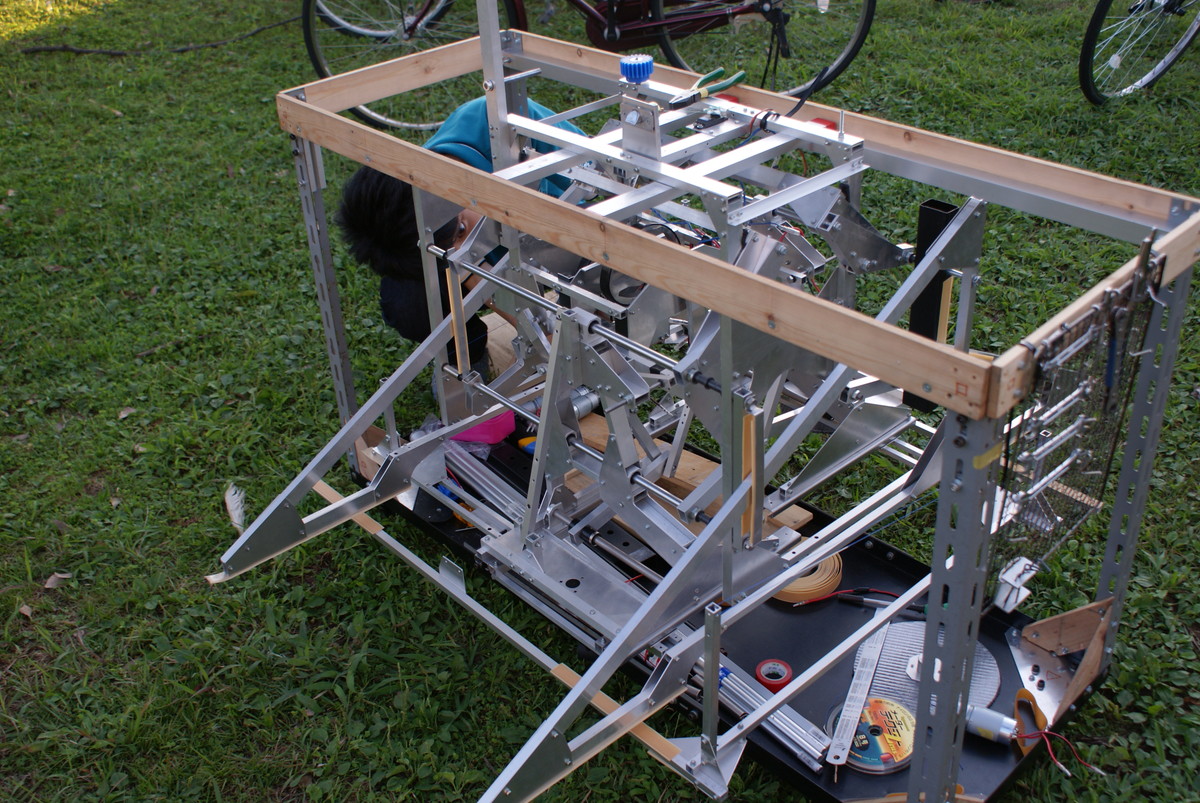
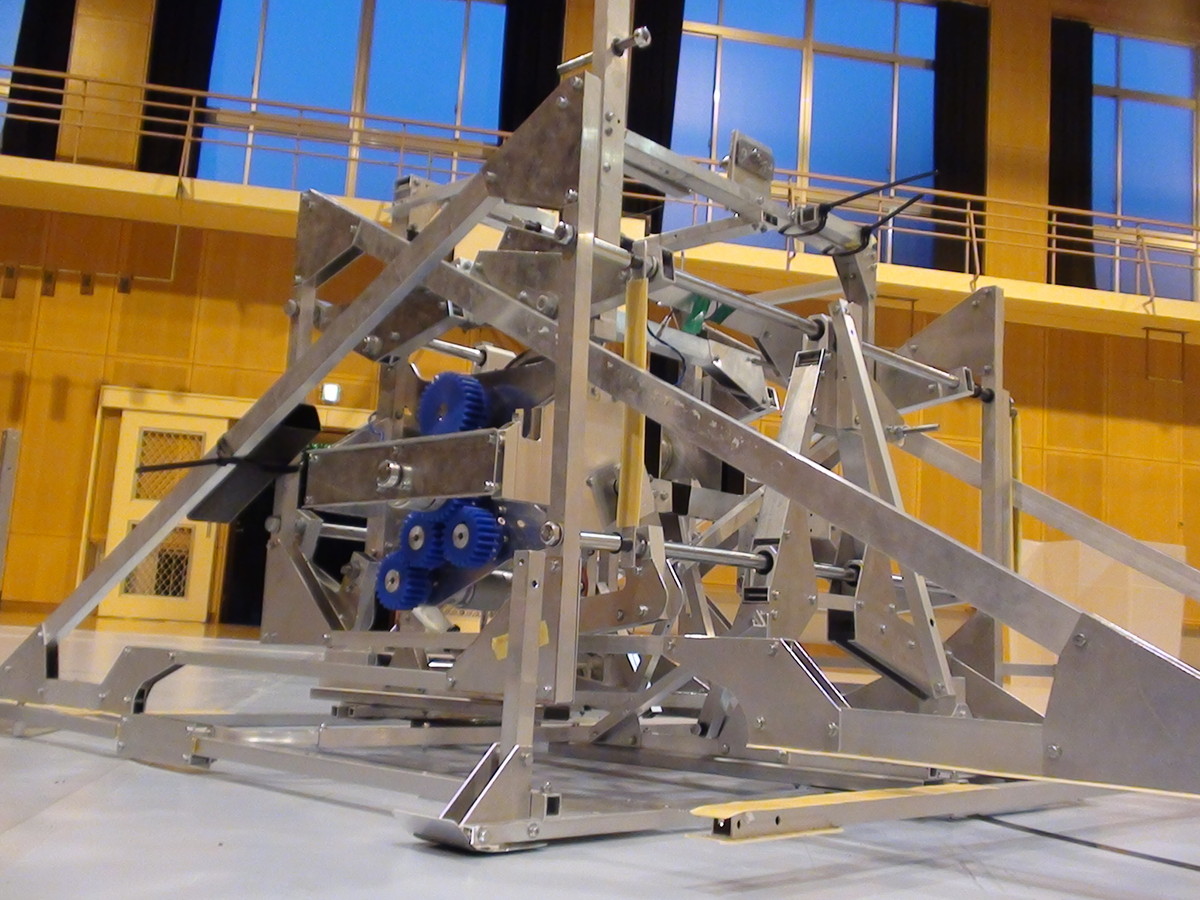
- オフェンスロボット「JUKE」
-
-
-
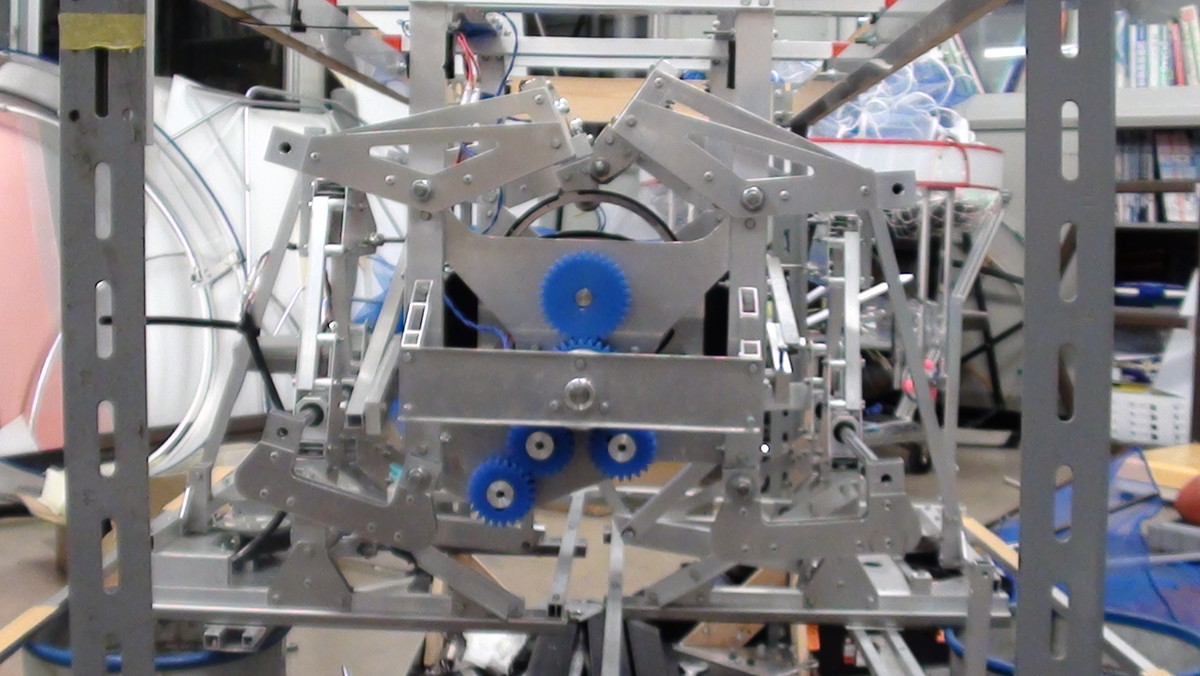
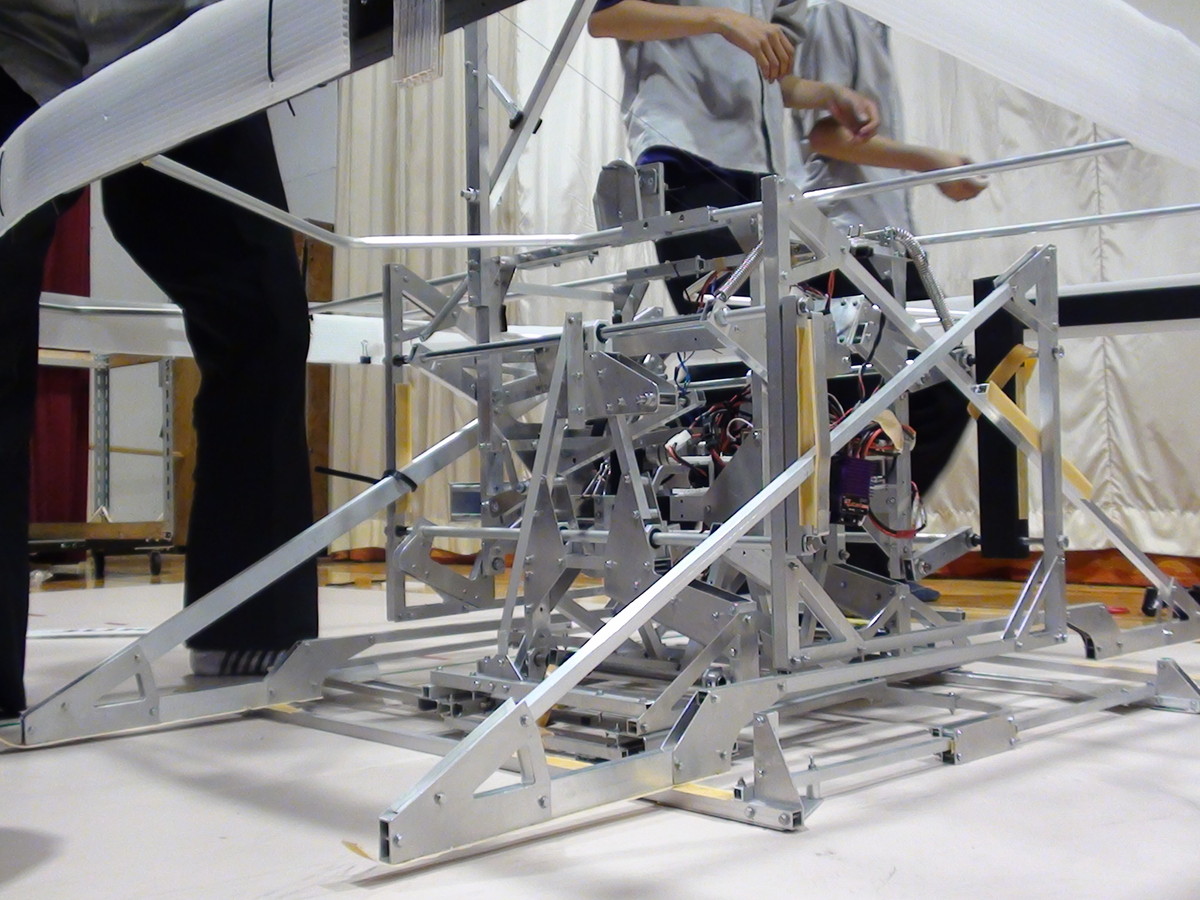
足回り 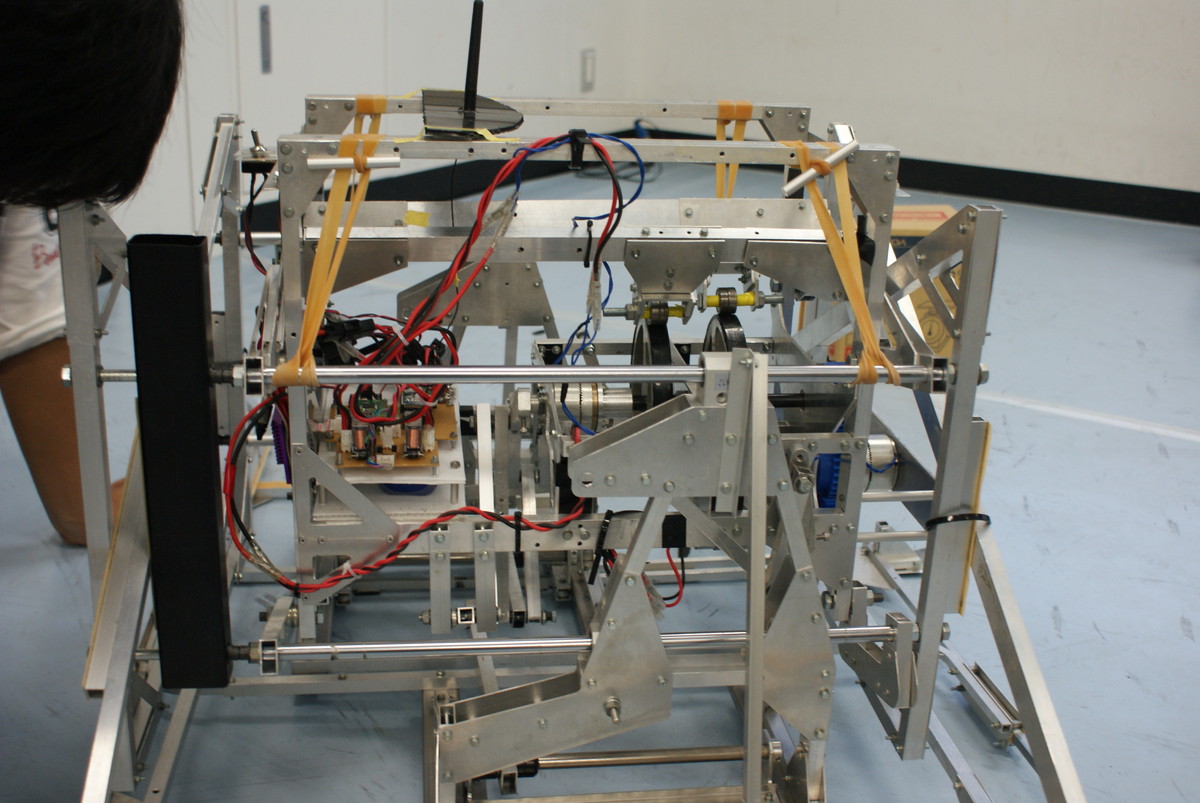
高専八代伝統のカムとリンクを用いた歩行機構です.
当時2年生のチームリーダーが設計しました.
この歩行機構は, 2つの電磁クラッチを使用することで全方位移動を行っています.
そのため軸が直行するなど,設計,製作ともに大変苦労しました.
エアーや旋回板を使用しないロボットとしては初の全方位移動が可能な 二足歩行ロボットとなっています. -
投球機構 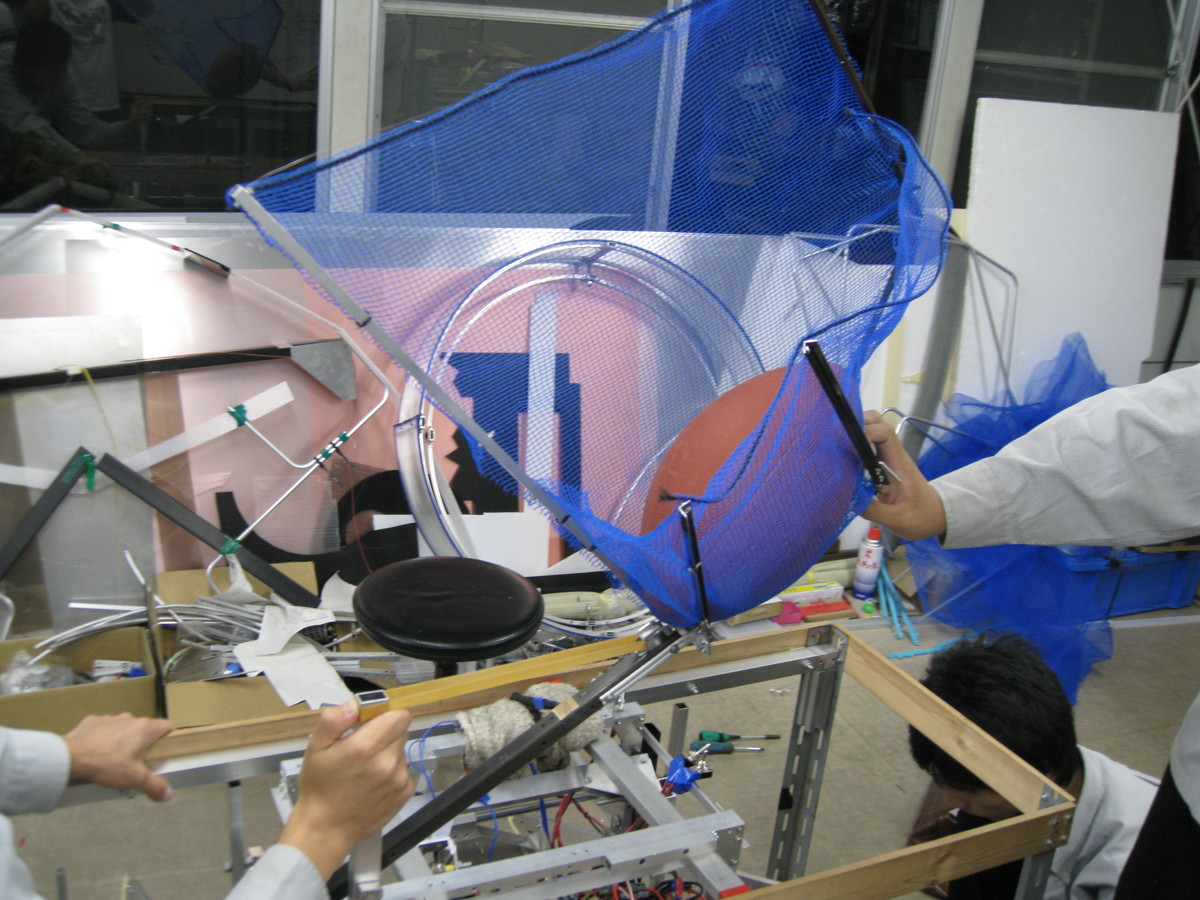
捕球したボールを輪ゴムによって溜めたエネルギーを利用し, 捕球場所からそのまま投石器のように飛ばします.
捕球口はボールが入りやすいように周りを囲われており, チーム名である「JUKE」の文字が入ったプラダンがつけられています.
-
-

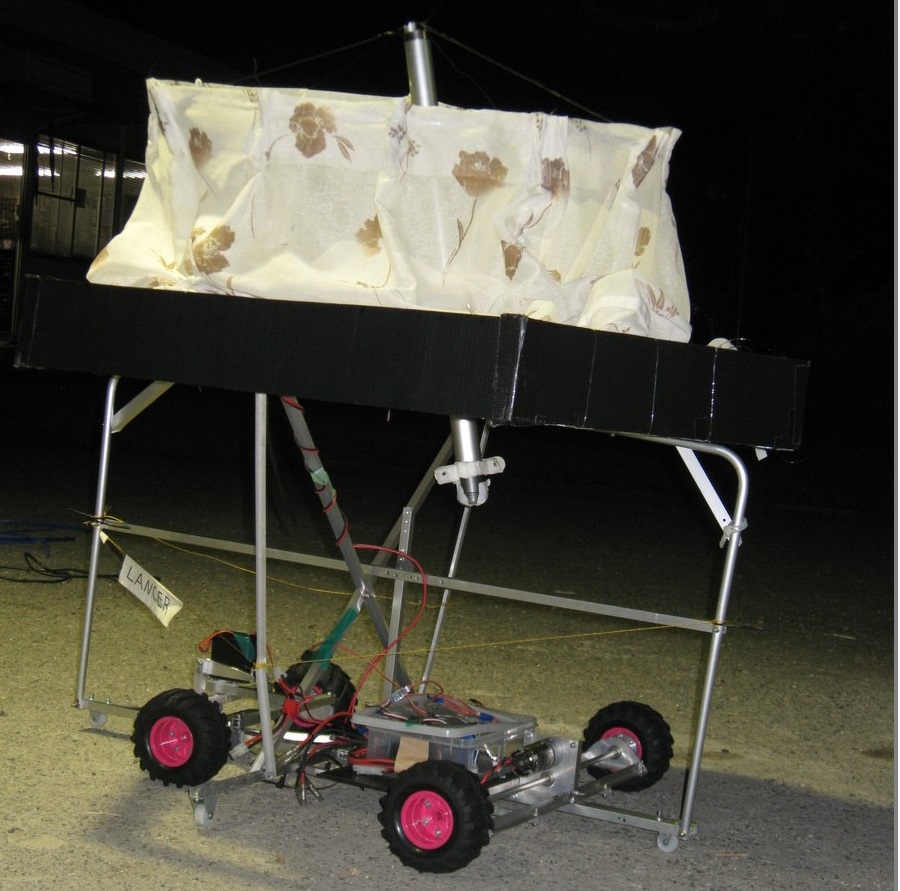
- ディフェンスロボット「LANCER」
-
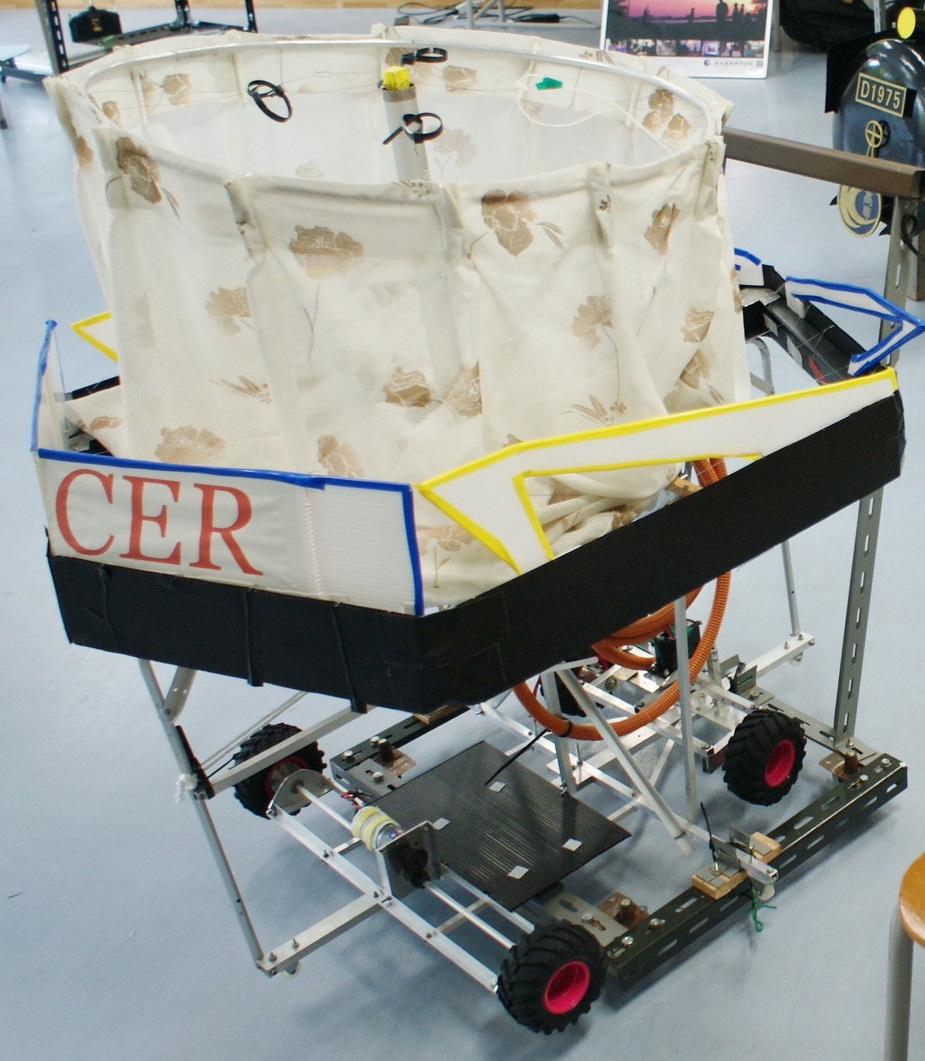
雨樋やカーテンなど,日常生活の中で身近にあるものを用いたり, 部室に在った部品を積極的に使用しているので,割と低コストだったりします. -
-
タイヤ回り 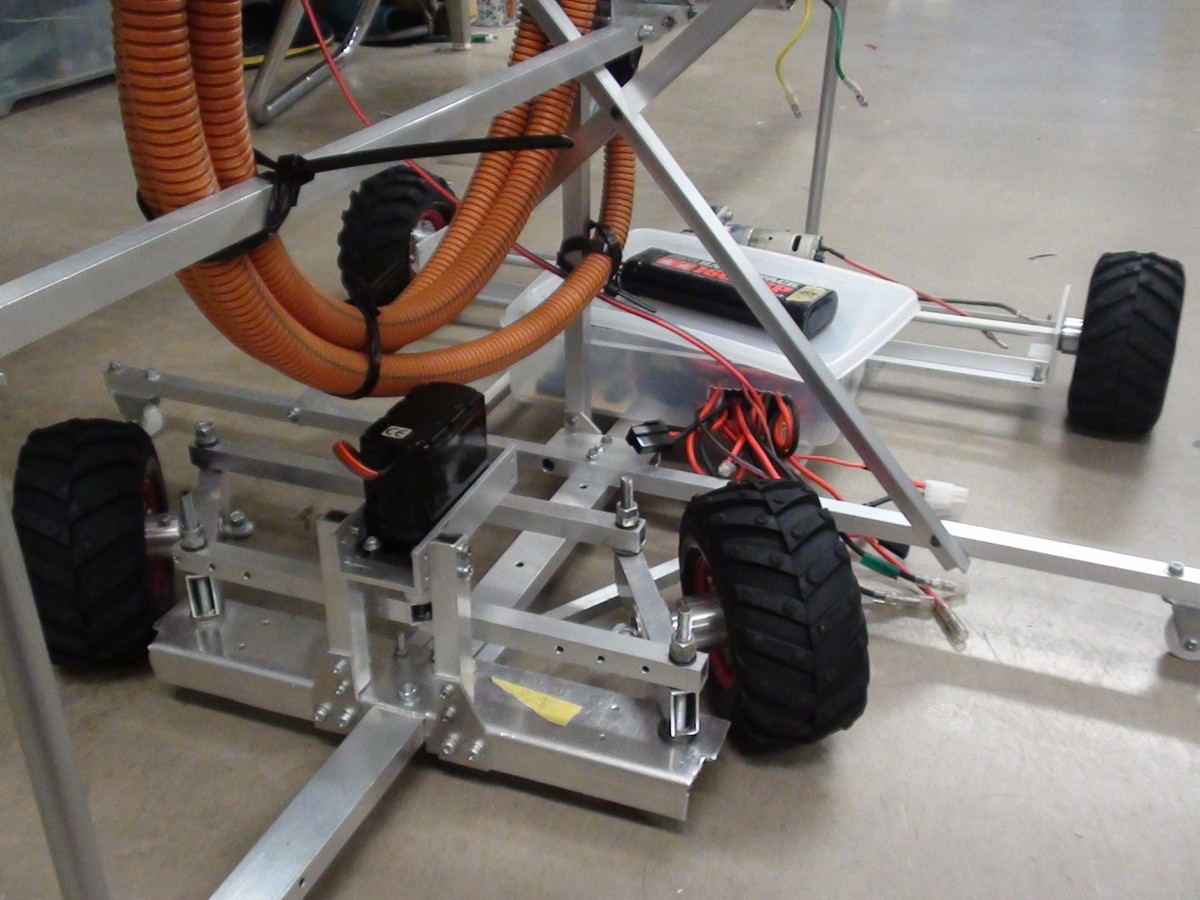
本物の自動車のようにステアリング機構を用いたことにより, 小回りが利くようにしています. -
ディフェンス機構 
タイヤユニットの上部にある黄色いチューブのなかに フレキシブルラックが入っており,それをモーターで動かし, 支柱となっている釣竿ごとディフェンス機構を展開させます. -
回路・プログラム メインのマイコンはBestTechnology社のH8/3687,統合開発環境はGCC Developer Liteで言語はCです.
オフェンスロボットとディフェンスロボット2台を1人で担当するため同一仕様です.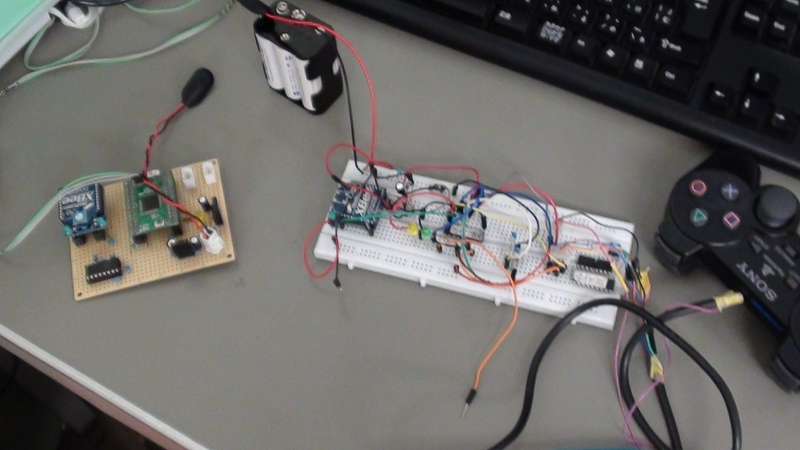
コントローラーは,重量制限に含まれる関係でDualShock2&XBeeの組み合わせを初めて採用しました.
しかし,DualShock2の内部回路との通信がうまくいかないのか,なかなか動作が安定しなかった模様です.
ちなみにDualShock2内部回路の通信には,PIC16F819のSPIを使っていました.
モータードライバ回路(MDC)は,Bチームと同一仕様のものを採用しました.
-
-