本気の宅配便
名前の由来はとあるチームメンバーが「魔女の宅急便」が好きだったため,それをもじってつけられました.
「まじのたくはいびん」です.「ほんきのたくはいびん」「まじのたっきゅうびん」と間違われたことがあります.
地区大会では優勝し,全国大会では優勝・ロボコン大賞・特別賞(東京エレクトロンFE株式会社)の三冠を獲得しました.
優勝とロボコン大賞のダブル受賞は,高専ロボコン史上3校目の快挙です.
また,熊本高専八代としても初の全国大会優勝,初のロボコン大賞です.
シーズン通しての練習回数は800回を超えました.
全地区大会を含めた全試合の中で,最大枚数の「24枚×2回=48枚」を3分間で出前しています.
- 出前ロボット
-
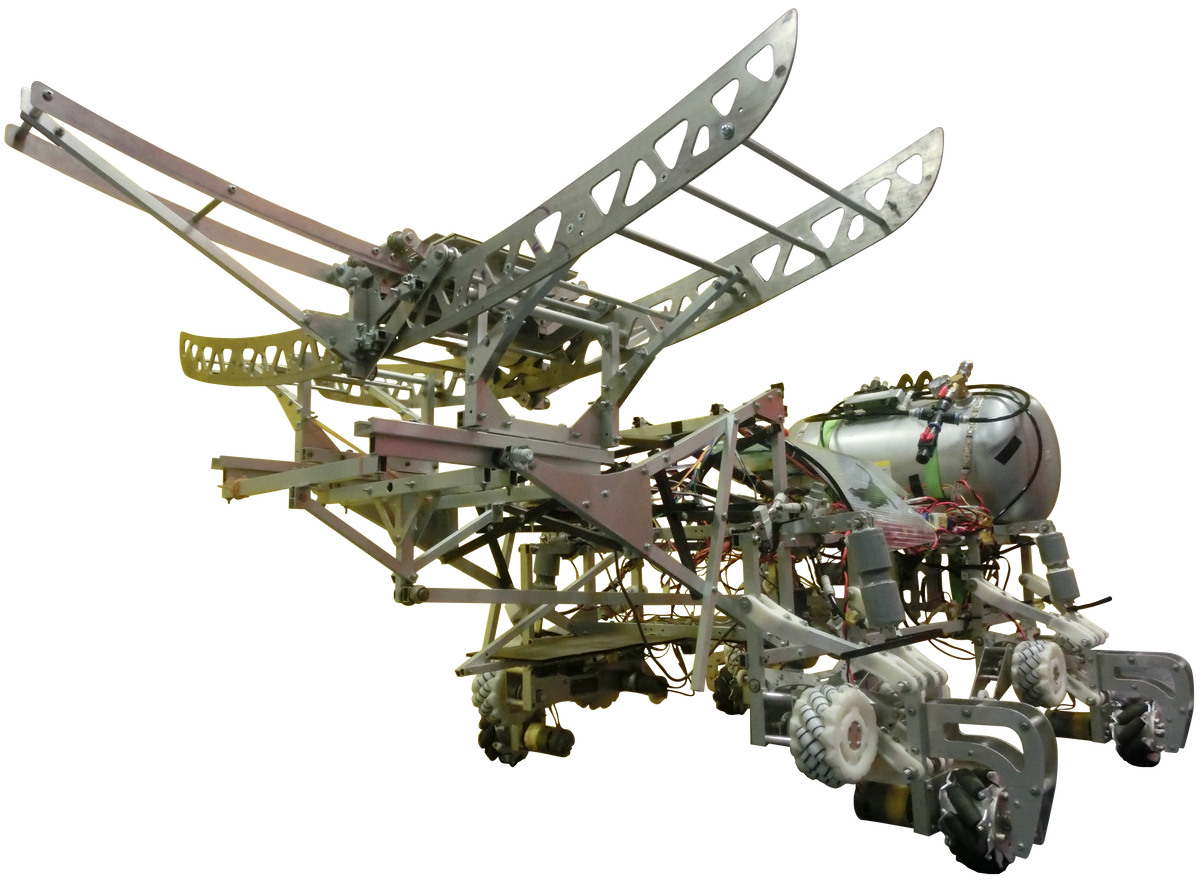
モチーフは「黒豹」で,非常停止スイッチ付近には黒豹の絵が貼られています.
地区から全国までの約1か月間に改良を重ね,運べる段数を16枚→24枚まで増やしました. -
-
足回り 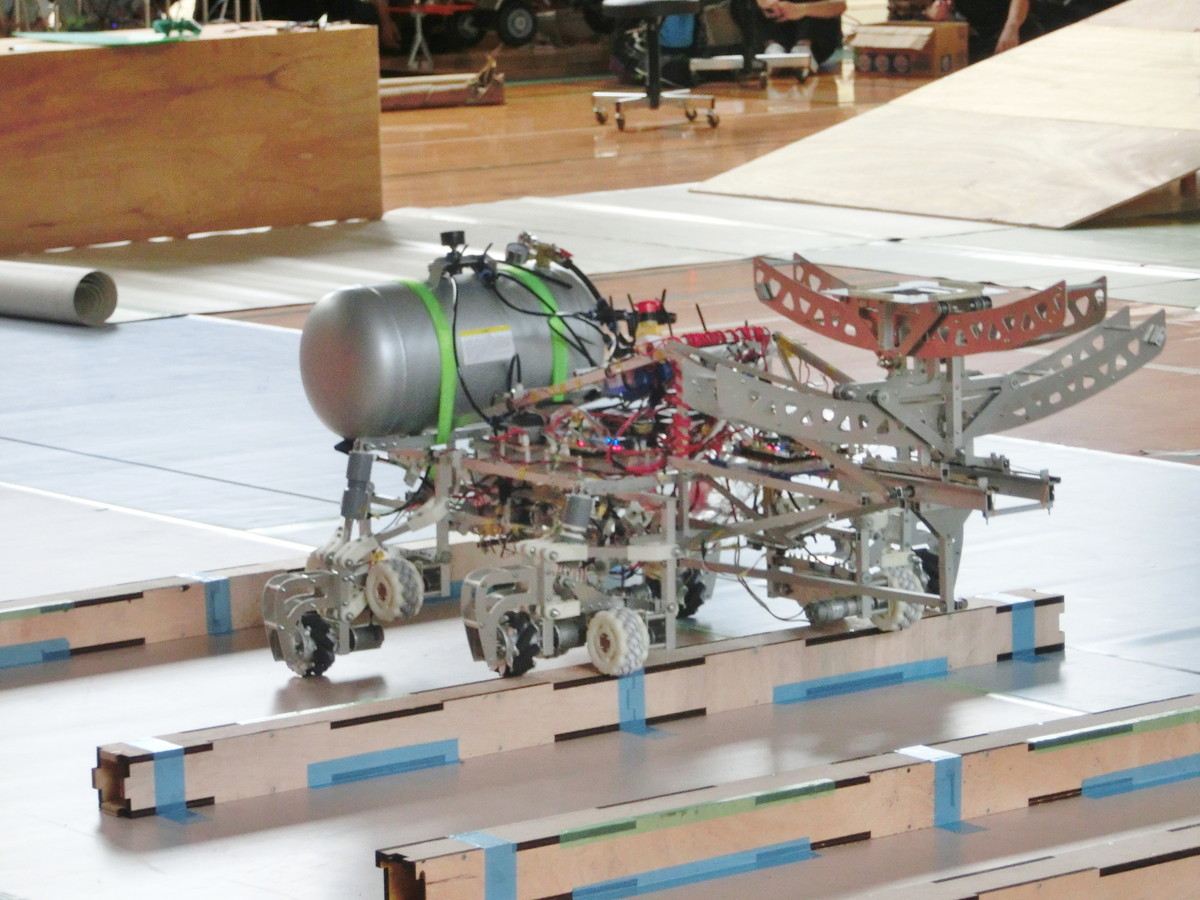
角材を越えていくため,4つのタイヤを圧縮空気の力を使い,足を上下させる機構が付いています.
上下させるのに使用しているのは自作のエアーシリンダーです.
この足の上下と,全方向に動くことが出来るメカナムホイールによってスムーズに各ゾーンをクリアしていきます.
ロボット本体についているメカナムホイール(白い方)も3Dプリンターで成形したもので自作しました.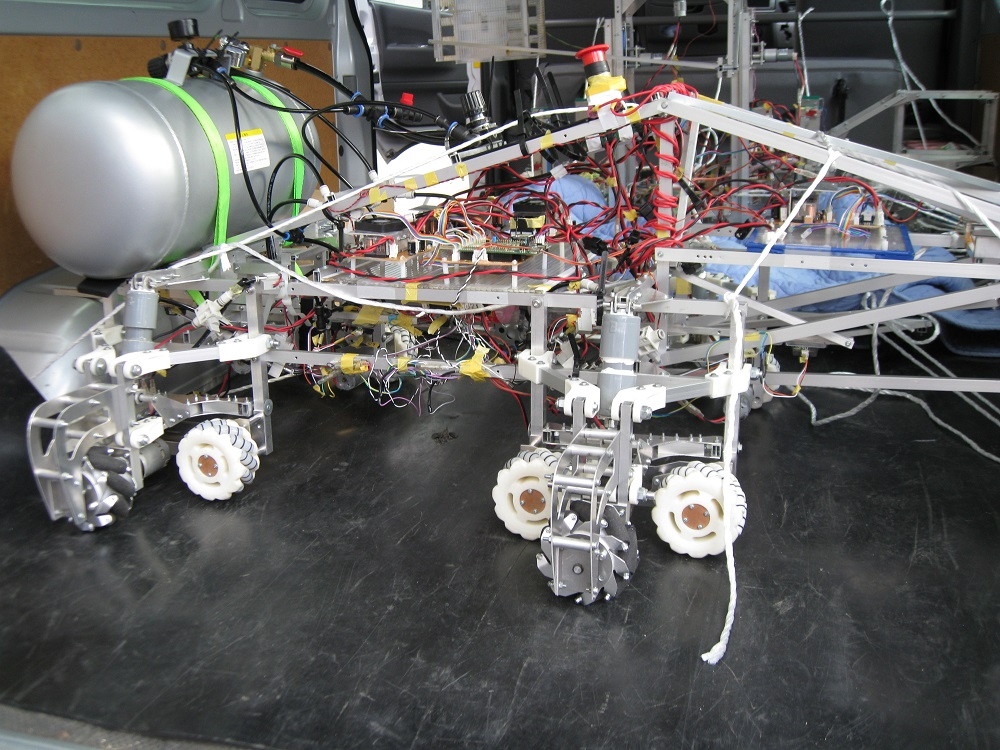
なお,角材ゾーンを斜めに突っ切る作戦もありましたが,労力に見合う成果が得られないと判断し取りやめになりました.
3Dプリンター製のメカナムホイールの意味はそこにあります. -
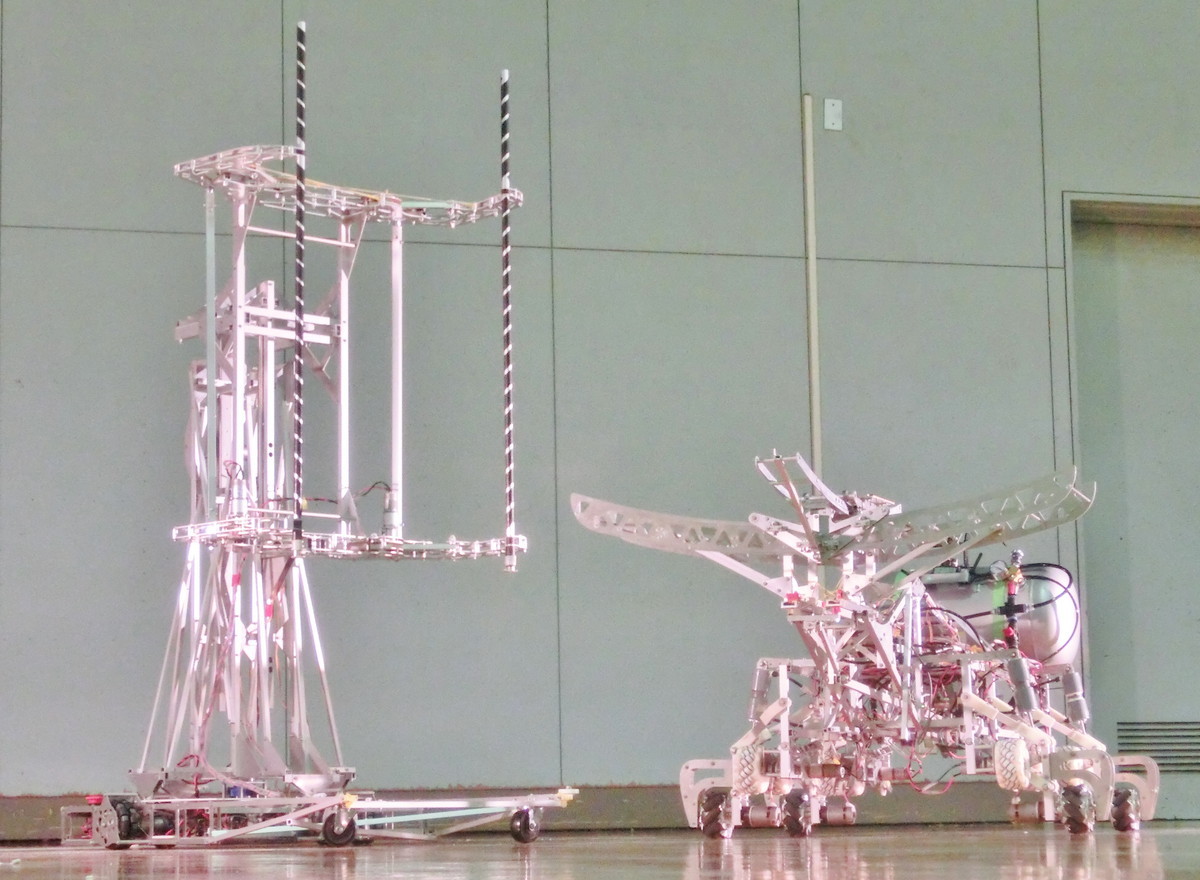
4重の蒸籠安定装置「Chozetsu」 
全国でも,類を見ない4重の蒸籠安定装置を搭載しています.
下から説明します.
1段目は,ロボット自身の傾きをセンサで検出し,ポンピングブレーキを用いたリンク機構で上3段を水平制御します.
2段目は,縦方向のダンパーを搭載し,停止時や発進時の加速度を減衰させます.
3段目は,横方向に円弧形のレールを搭載し,加速度や坂の傾斜に応じて自然に動きます.
4段目は,3段目と同じ構造のレールを縦方向に搭載しています.
特に1段目がミソで,振り子を大型化を最小限にとどめながら,蒸籠の枚数を増やすことにつながっています.
もちろん,ほかの段も重要で剛性やガタ対策,滑り具合などの工夫が随所に施されています.
これらの機構をまとめて,「Chozetsu」と呼んでいます.「超絶」ではなく「Chozetsu」です.
これは,開発者がこのアイデアを考えたときに「この機構,"Chozetsu"滑りよくないとダメですよね」と発言したことからこの名前になりました. -
エアータンク 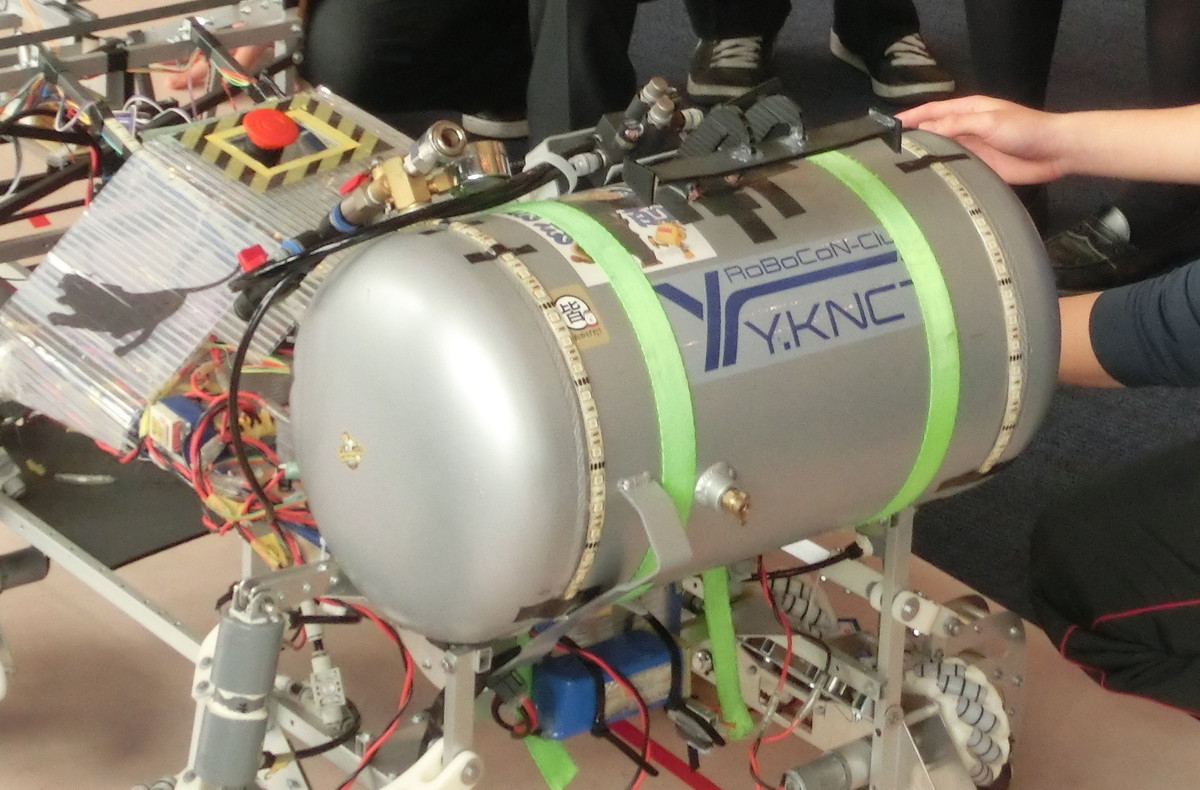
今回は金属製のエアータンクを使用しました.
圧縮空気を貯めるという事の他,ロボットの重心を後ろに持っていくためのカウンターウェイトになるという役割があります.
このロボットではカウンターウェイト対策をいくつか行っていますが,それでも傾斜ゾーンでは後輪が浮くほどせいろが重いです.
また,ペットボトルは暴発する恐れがありますが,タンクは強度があるので,安心して多くの練習に取り組めます. -
回路・プログラム 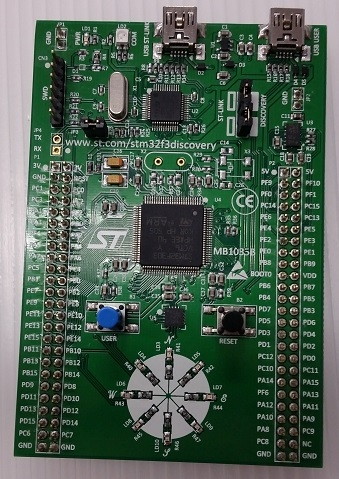
マイコンはSTM32 F3 DISCOVERY,IDEはIAR Embedded Workbench,言語はCを使用しました.
マイコンボードを3枚使用しています.担当者も3人です.
以下のように分けています.
・全体的な足回りの制御&コントローラとの通信
・角材を乗り越えるための足の上下制御
・傾斜ゾーンでせいろを落とさないように水平に保つ制御
モータードライバ回路(MDC)は,リレー+MOSFETの組み合わせは変えず,MOSFETを強力かつ低コストなものを採用しました.
MDCの故障はかなり減りました.
バッテリーは,Hyperionで回路用にLiPo 3S 11.1V 45C 1100mAh,モーター駆動用にLiPo 5S 18.5V 45C 2600mAhを使用しています.
ちなみに,カウンターウェイト対策でバッテリーも出前ロボット後方に搭載しています.
コントローラーはDUALSHOCK2,DUALSHOCK2内部回路との通信はArduino Pro Mini,無線通信モジュールはXBee Series1 Proを採用しました.
DUALSHOCK2とArduinoの通信は,インターネットで拾ったライブラリを活用しました.
ちなみにSeries1と2との違いの問題から,この出前ロボットのみSeries1を採用しています.足回り担当 全方位移動が可能なメカナムホイールの制御を担当しています.
このほかにも,コントローラーとの無線通信を受信し,ほかの2つに渡します.
操縦者が操縦しやすいようにフィールドの場所によって細かいモードわけがされています.
それぞれのモードでは,最大出力や分解能が変化します.
例えば,せいろが倒れないようにモーターの回転をコントローラのスティックに比例した線形でなく,二次関数のように最初の分解能を細かくしました.
選手たちがモードわけをわかるようにテープLEDを初採用しました.
これにより,傾斜ゾーンモードで角材ゾーンに突入し,角材に激突するような間違いがなくなりました.
以下,ゾーンごとの細かい制御の違いと色を示します.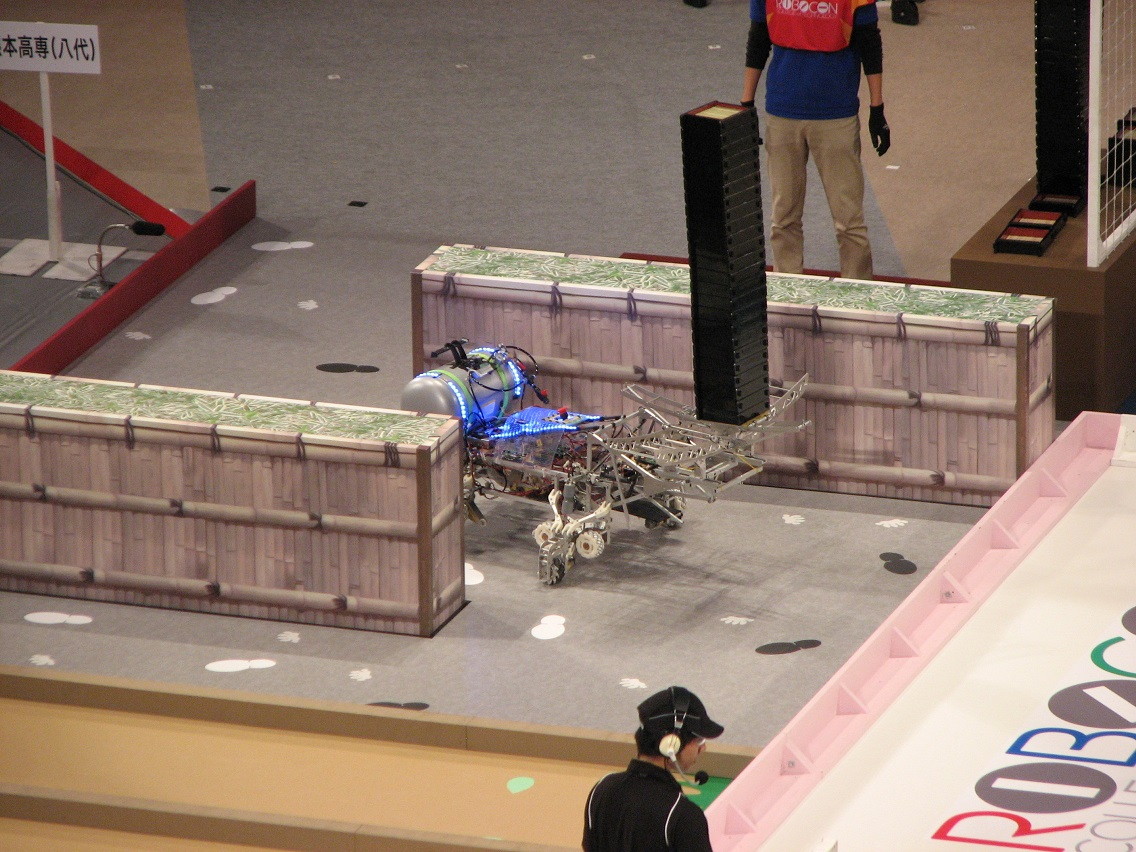
スラロームゾーン(青)
動き出しを滑らかにかつ,旋回性重視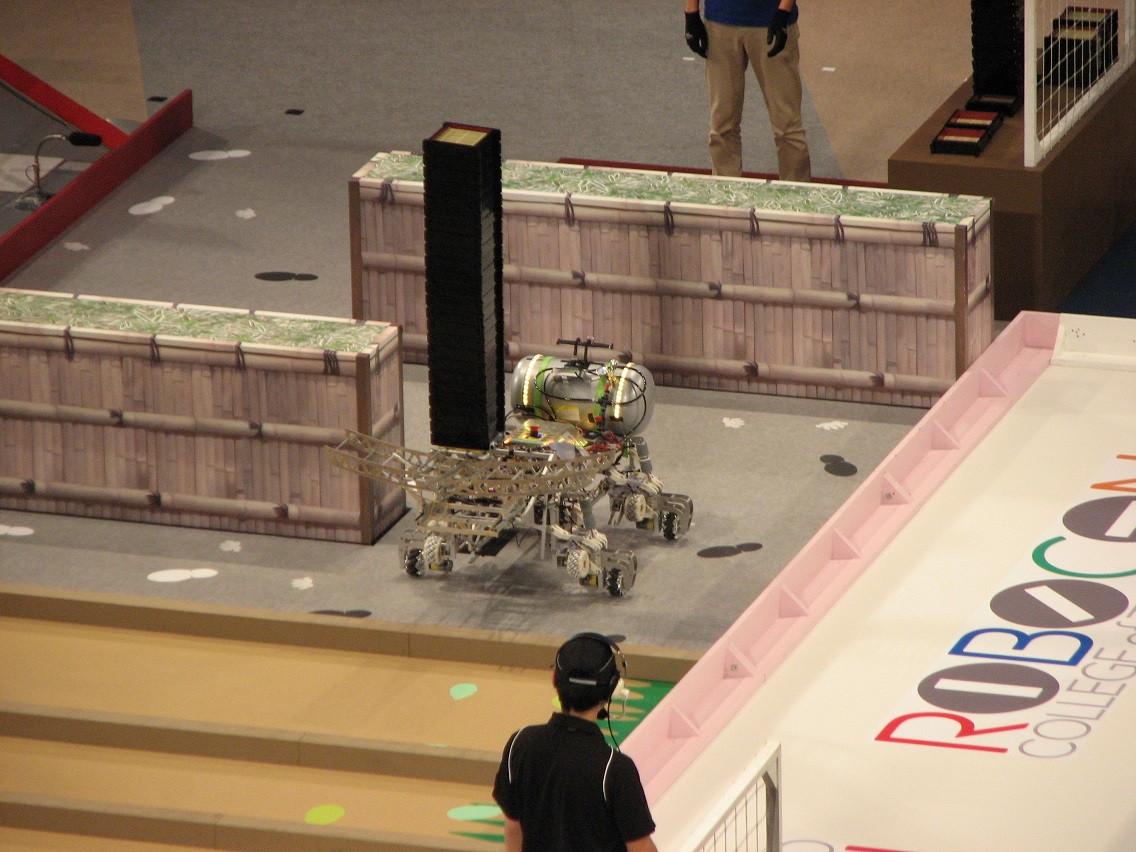
角材ゾーン(黄)
足上下のタイミングがずれないように速度一定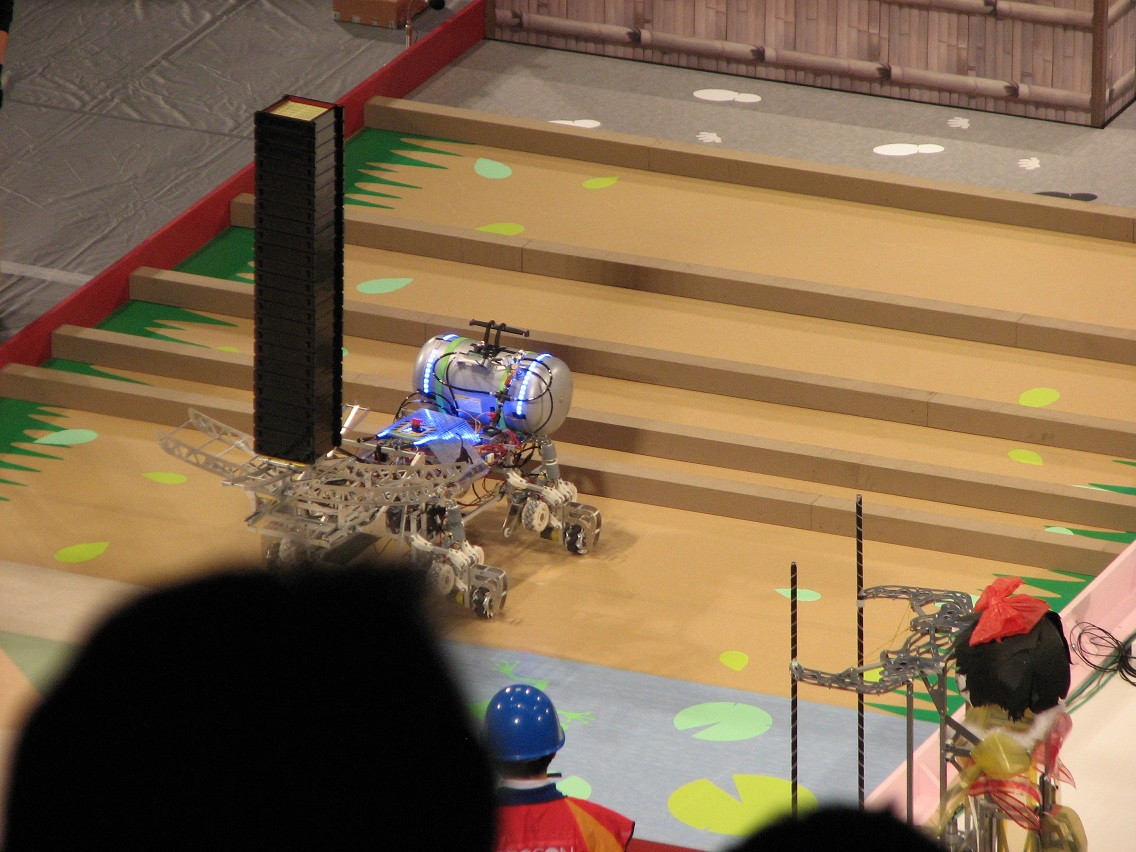
傾斜ゾーン手前(青)
せいろの重みで重心が前方にずれ,横にそのまま移動すると旋回するので,後ろ側2つの出力強め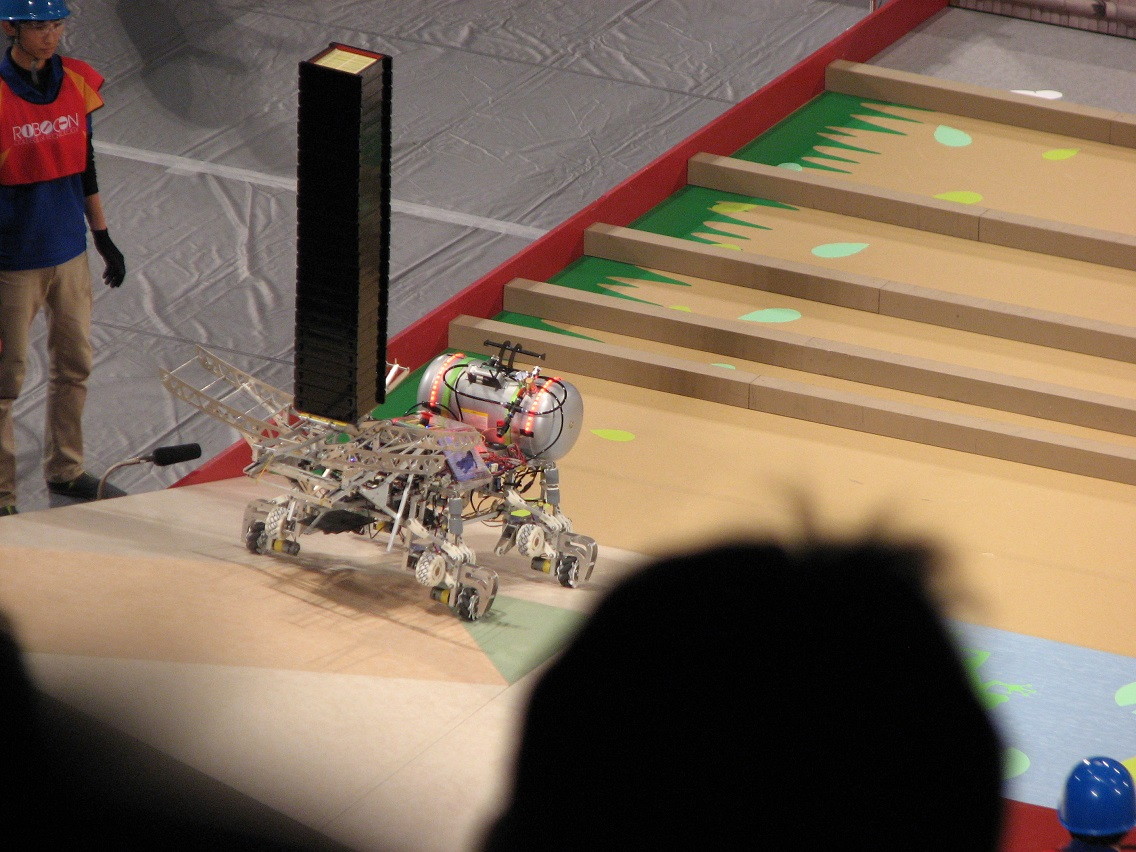
傾斜ゾーン上り(赤)
動き出し&最高速度極小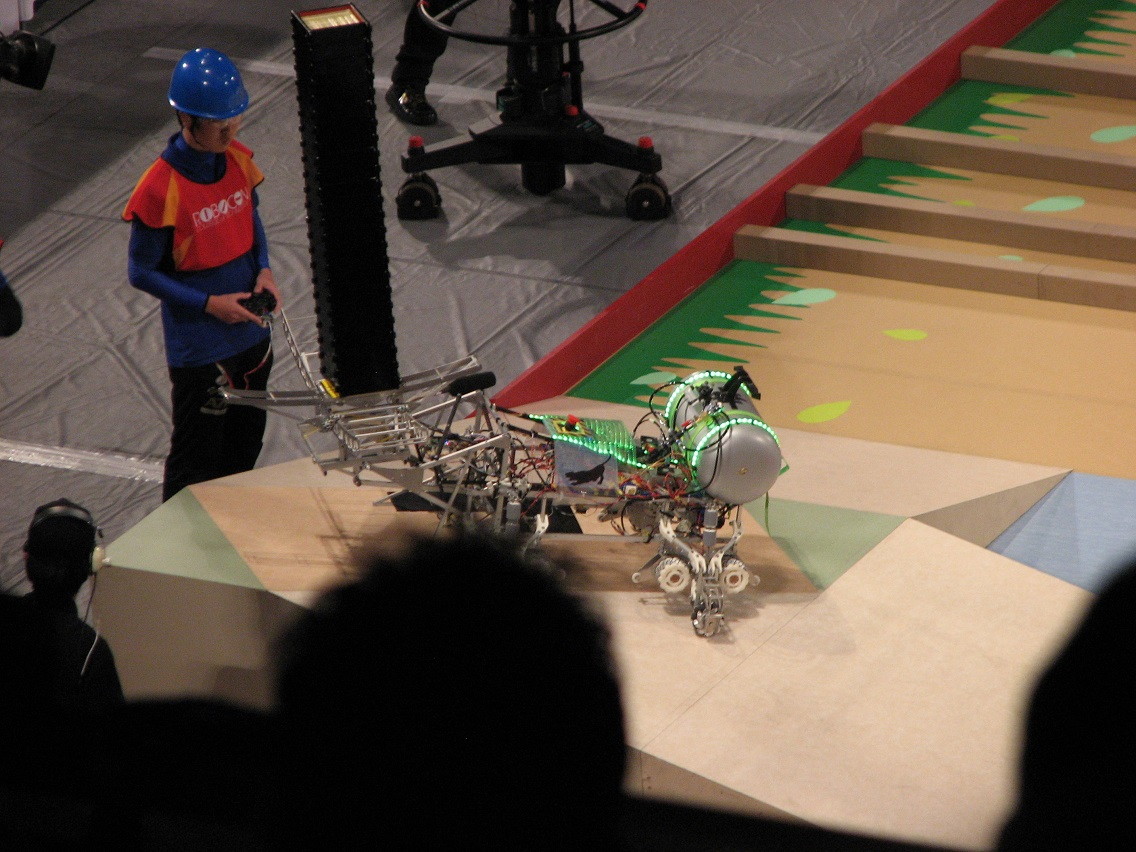
傾斜ゾーン下り(緑)
動き出し&最高速度極小
追加でスイッチバックのため左前のタイヤを一時固定
受取ゾーン(青)
受取ロボットとの調整のため低出力時の操作性重視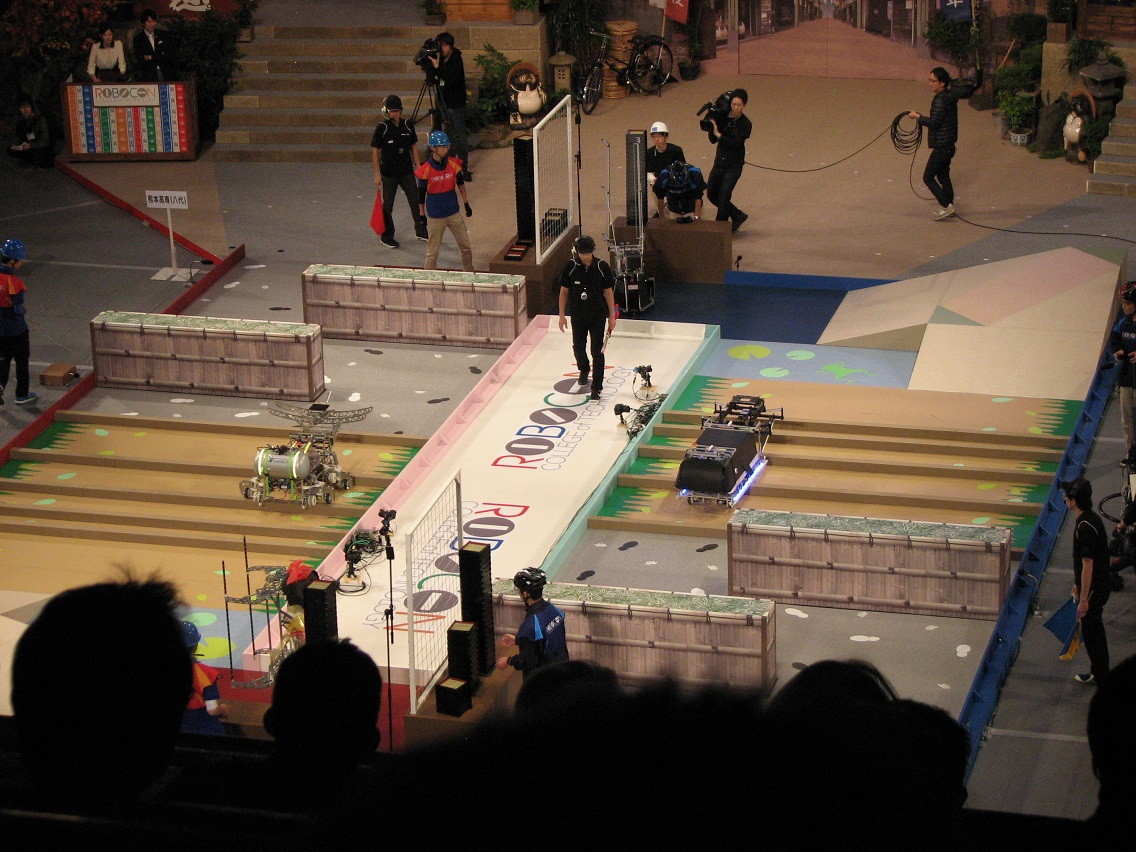
復路(青)
速度,旋回の出力はMAX.0.1秒でも早く戻る
ただし,角材ゾーンは角材ゾーンのモードで進む足上下担当 角材をロボットの中央下向きに取り付けられたPSDセンサーを用いて検出し,シリンダーを駆動させてエアーの力で足を上下させます.
足回りと通信しているので誤作動を防止するために角材モードの時しか動作しません.
センサーは全部で3つ付いておりそれぞれ違う役目があります.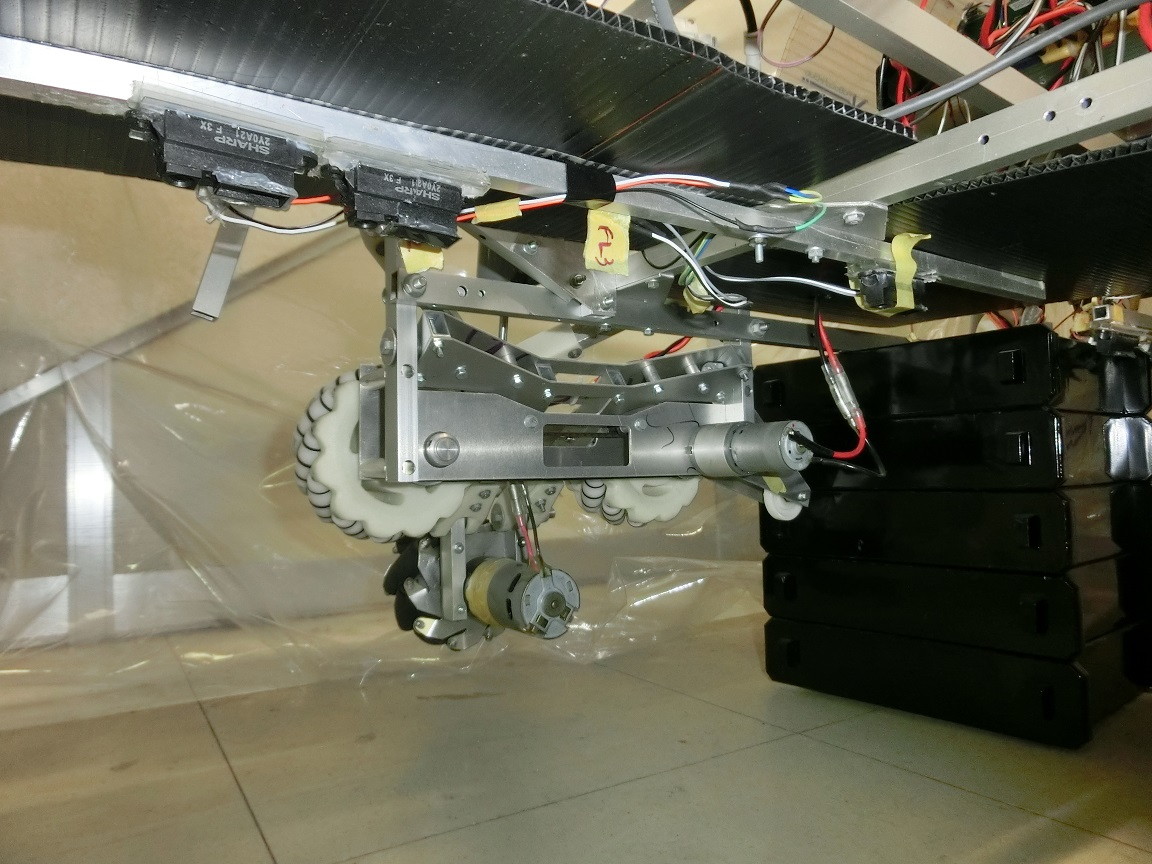
手前から解説します.
1つ目:角材の検知&シリンダー内のエアーを抜く
2つ目:足上げる
3つ目:足下げるせいろ安定制御 蒸篭を水平に保つため,加速度センサー,ジャイロセンサー,傾斜センサーを組み合わせています.
ロボットが動いているうちは加速度センサーとジャイロセンサーで適宜お盆の角度を変え,
坂の頂上で停止したところで傾斜センサーを用いて微調整を行います.
これにより,角度の誤差が少なくなりました.これも傾斜モードの時しか動作しません.
-

- 受取ロボット
-

モチーフは「魔女」で,赤いリボンと黄色い衣装が特徴的です.
会場では目立ちませんでしたが,目が光ります. -
-
足回り 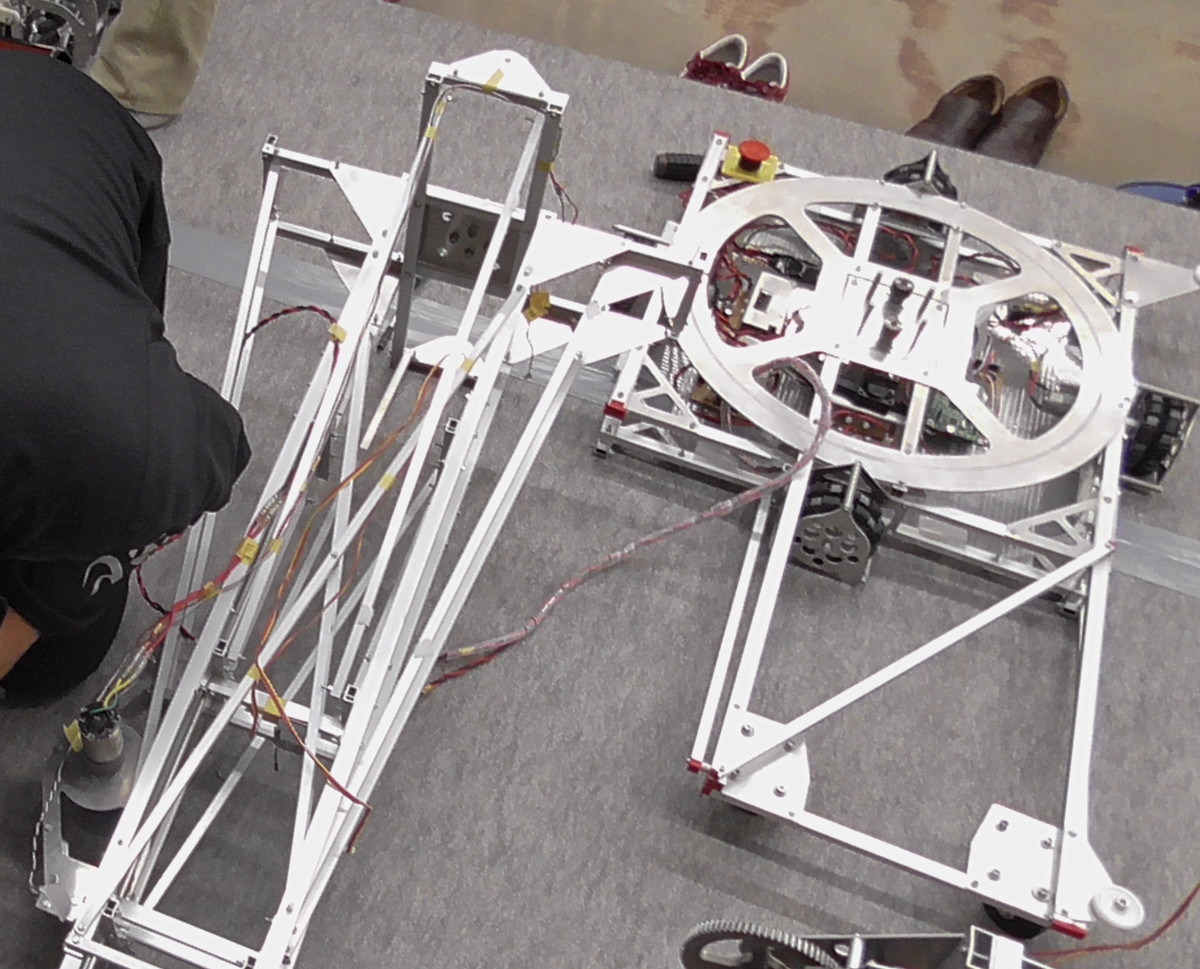
オムニホイールを用いた4輪駆動で,蒸籠を持った時に転倒しないように補助輪がついています.
レーザー加工した部品を用いたスマートな設計になっています. -
蒸籠を持つ機構 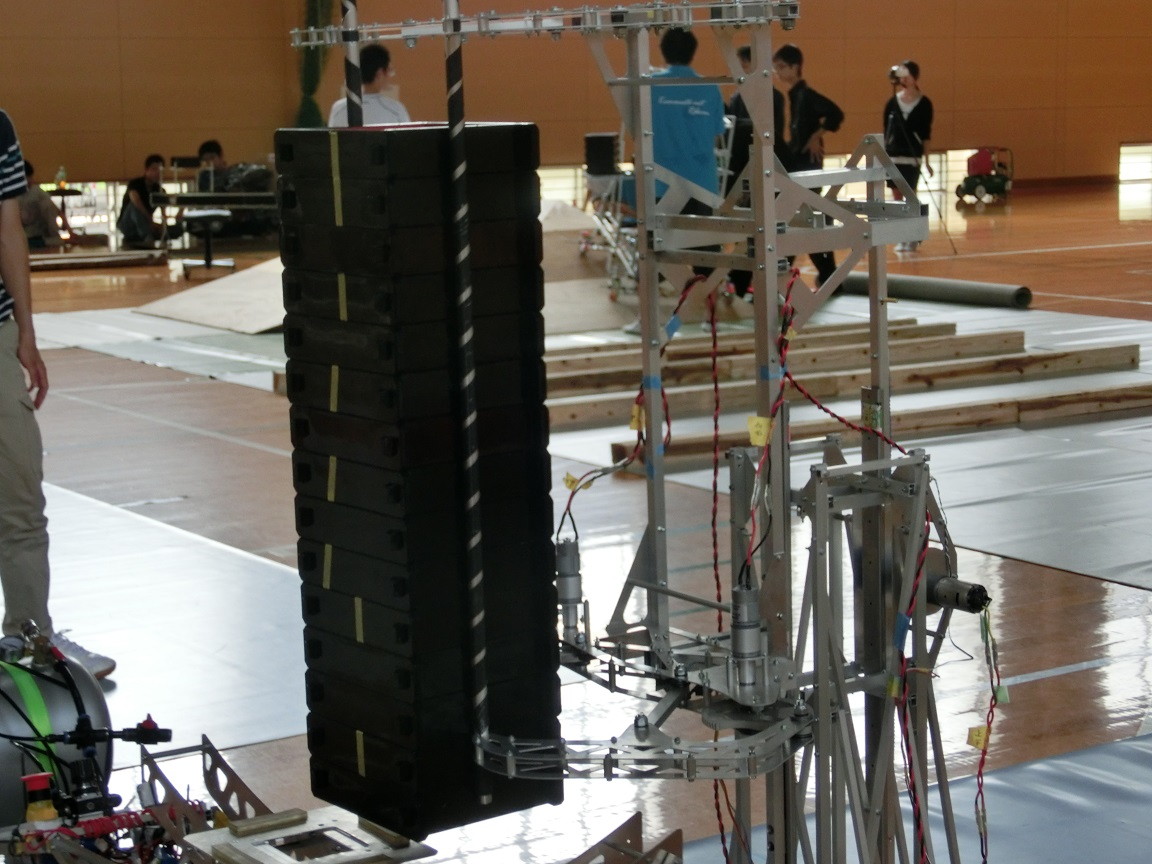
2つのモーターで腕を動かし,1つのモーターで腕の上下を行います.
軌跡が直線になるようにリンク比などを工夫しました.
また,蒸籠を掴む部分には滑り止めがついています. -
回路・プログラム
マイコンはSTM32 F3 DISCOVERY,IDEはIAR Embedded Workbench,言語はCを使用しました.
出前ロボットが運んできたせいろをつかんで台に置くだけなので,センサーは使っておらず,複雑な制御もしていません.
たくさんの蒸篭を持ち上げて移動するので移動時,旋回時の操作性を重視した足回り制御となっています.
モータードライバ回路(MDC)は,リレー+MOSFETの組み合わせは変えず,MOSFETを強力かつ低コストなものを採用しました.
MDCの故障はかなり減りました.
バッテリーは,回路用にHyperion LiPo 3S 11.1V 45C 2600mAh,モーター駆動用にHyperion LiPo 4S 14.8V 45C 2600mAhを使用しています.
コントローラーはDUALSHOCK2,DUALSHOCK2内部回路との通信はArduino Pro Mini,無線通信モジュールはXBee Series2 Proを採用しました.
DUALSHOCK2とArduinoの通信は,インターネットで拾ったライブラリを活用しました.
この年のルールで突然,無線通信が認められたため新規開発になりました.
ちなみに,全国大会で電源回路の可変レギュレータの足が折れていることに気づかぬまま試合をしていました. これに気づいたのが大会後の地域イベント出展中です. いま考えれば恐ろしい話です.
-