Welkame!

「龍宮城に着いた浦島を歓迎する宴で,亀と乙姫様が協力して蕎麦を浦島に運んで来る」というストーリーなっています.
- 出前ロボット
-
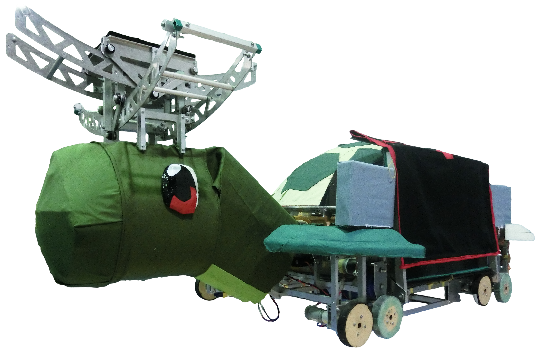
モチーフは浦島太郎に助けられた「亀」.宴で浦島太郎に蕎麦を運びます. -
-
蒸籠保持機構 
頭の上にある蒸籠保持機構はAチーム「本気の宅配便」の自然振り子機構初期版を流用し, 最大9段の蒸籠を運べるように設計されています.
振り子の原理を利用して,前後左右に蒸籠が揺れてもその衝撃を和らげ,15°の傾斜を登っても 蒸籠と床が平行になるように動いてくれます. -
角材ゾーンを越える機構 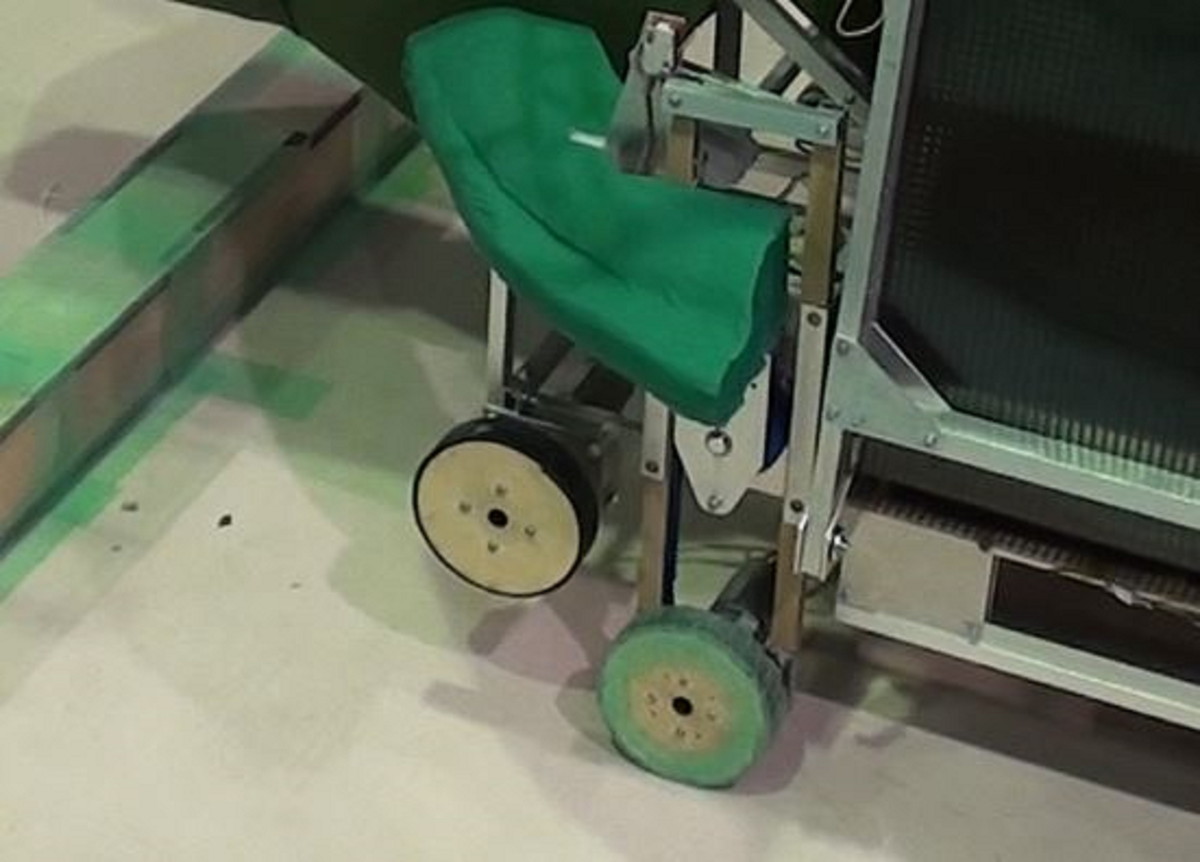
先に述べた自然振り子機構初期版により前後左右の揺れを低減させ, 4本の伸縮する脚と,ロボット本体に取り付けられた2個の受動タイヤ, 2個のモーターがついたタイヤ,角材を検知するPSDセンサーを用いて角材ゾーンを滑らかに越えていきます. -
傾斜ゾーンを越える機構 
4本の伸縮する脚と自然振り子機構初期版によって床との平行を保ちながら傾斜ゾーンをクリアします.
ほかのチームと違い,傾斜ゾーンに入るとき,バックなどせずそこに来た状態のまま登っていくので, 方向転換のタイムロスが少なくて済みます. -
合体機構 
出前先まで到達すると,甲羅が開き,それと同時に玉手箱をイメージしたスロープが降りてきて, そこを受取ロボットが登ってきます.
出前ロボットと受取ロボットが合体するというアイデアを実現したのは 全国で唯一八代Bチームだけでした. -
回路・プログラム 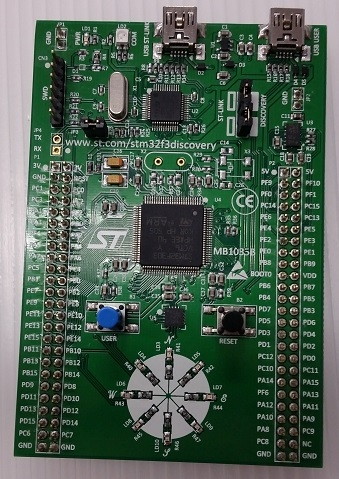
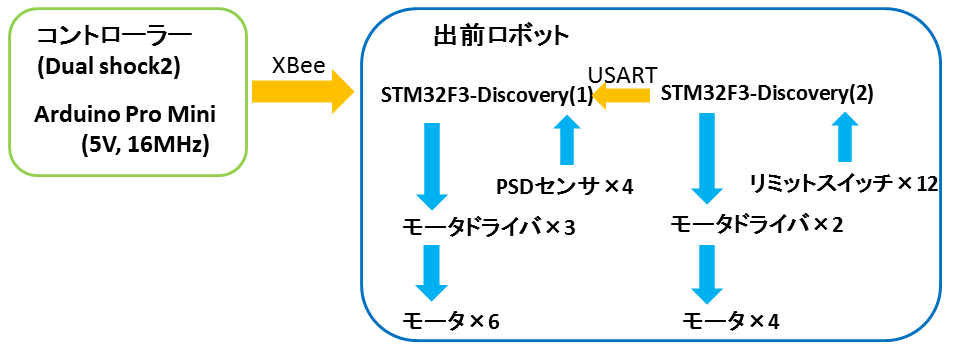
マイコンはSTM32 F3 DISCOVERYを2枚,IDEはIAR Embedded Workbench,言語はCを使用しました.
モータードライバ回路(MDC)は,リレー+MOSFETの組み合わせは変えず,MOSFETを強力かつ低コストなものを採用しました.MDCの故障はかなり減りました.
マイコンを2枚に分けたのは当時2年生の育成も兼ねてでしたが,結局3年生が1人で担当することになりました.
バッテリーは,Hyperionで回路用にLiPo 3S 11.1V 45C 2600mAh,モーター駆動用にLiPo 5S 18.5V 45C 4200mAhを使用しています.
ゾーンごとにモードわけを行っています.
(1)通常モード
角材や傾斜以外のモード
(2)角材モード
PSDセンサで角材を認識し,足の上下をするモード
(3)傾斜モード
駆動の限界のPWM値を下げるモード
コントローラーはDUALSHOCK2,DUALSHOCK2内部回路との通信はArduino Pro Mini,無線通信モジュールはXBee Series2 Proを採用しました.
DUALSHOCK2とArduinoの通信は,インターネットで拾ったライブラリを活用しました.
この年のルールで突然,無線通信が認められたため新規開発になりました.
-

- 受取ロボット
-

モチーフは竜宮城に住む「乙姫様」.「亀」から蒸籠を受取り,出前先である机に置きます. -
-
移動方法 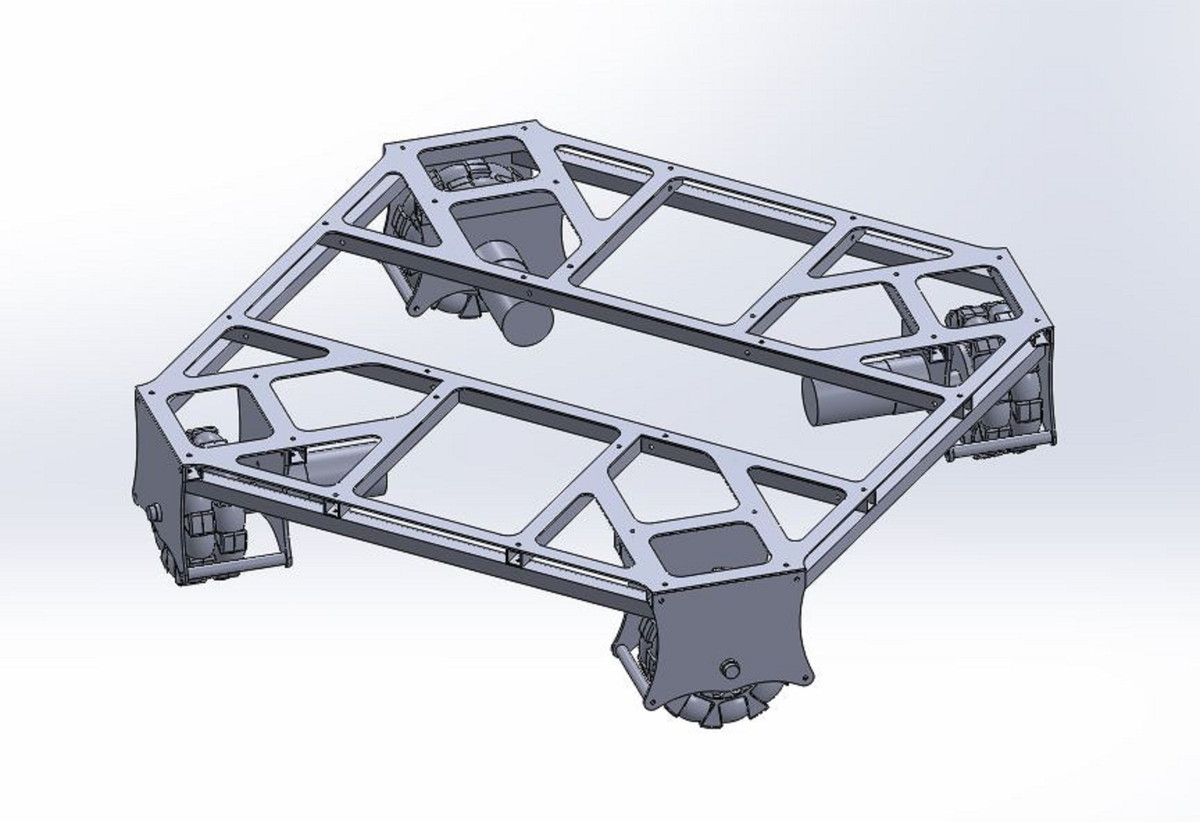
オムニホイールを用いた4輪駆動になっており,全方向へスムーズに移動することが出来ます.
これにより,出前ロボットが展開したスロープを,蒸籠を持った状態のまま登ることが出来ます. -
蒸籠を持つ機構 
リンク機構を用いて曲線的に動くアームを,左右独立させて動かして蒸籠を掴み, そのまま出前ロボットに登って出前先の机の上に蒸籠を置きます. -
回路・プログラム
マイコンはSTM32 F3 DISCOVERY,IDEはIAR Embedded Workbench,言語はCを使用しました.
モータードライバ回路(MDC)は,リレー+MOSFETの組み合わせは変えず,MOSFETを強力かつ低コストなものを採用しました.MDCの故障はかなり減りました.
バッテリーは,Hyperionで回路用にLiPo 3S 11.1V 45C 2600mAh,モーター駆動用にLiPo 5S 18.5V 45C 2600mAhを使用しています.
コントローラーはDUALSHOCK2,DUALSHOCK2内部回路との通信はArduino Pro Mini,無線通信モジュールはXBee Series2 Proを採用しました.
DUALSHOCK2とArduinoの通信は,インターネットで拾ったライブラリを活用しました.
この年のルールで突然,無線通信が認められたため新規開発になりました.
-
