八代の動く城
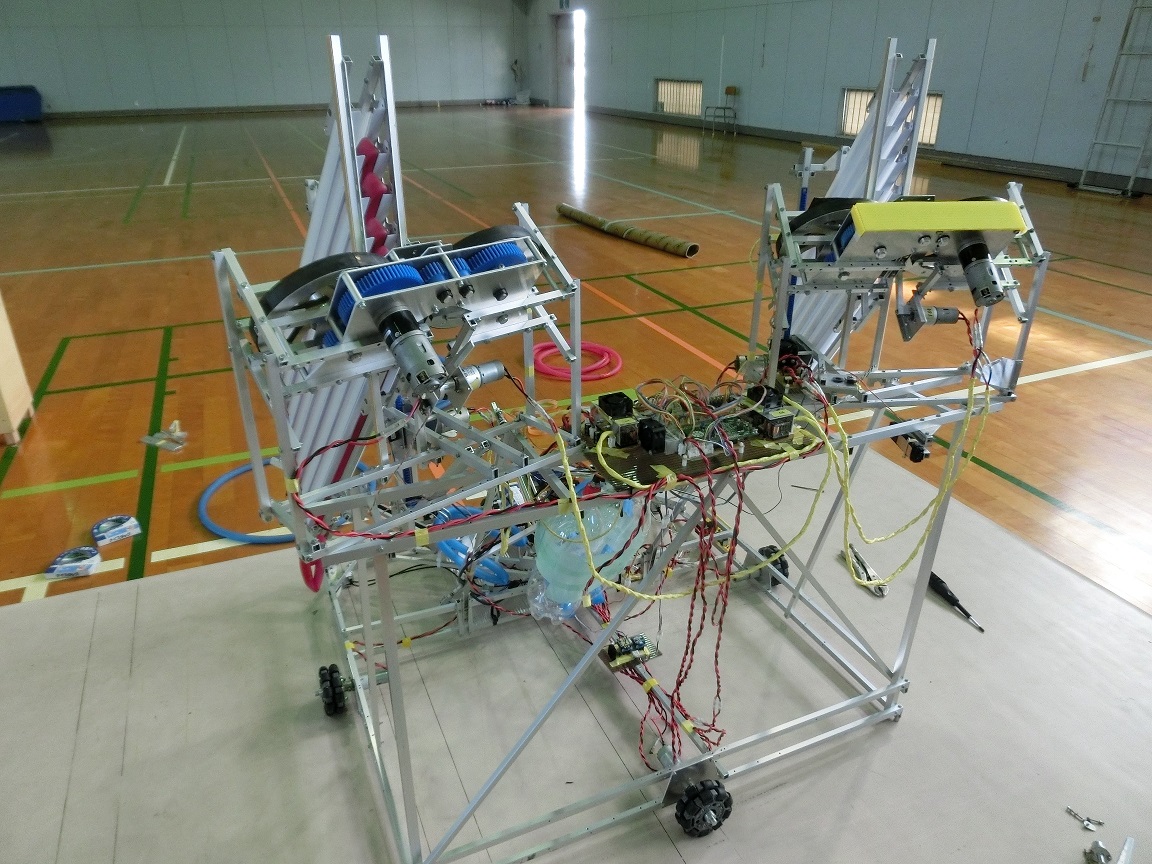
自陣側に3つ,相手陣側に2つの合計5つの発射機構を搭載しています.
名前の由来は製作していたら城っぽく見えるからジブリの名作をもじったところからです.
残念ながら,地区大会では2回戦敗退に終わってしまいました.
- 八代の動く城
-
スタートの合図とともに素早くフィールドの中央に移動し,3つの発射機構を用いて,1度に3つのポールに輪をかけます.
その後,2つの相手側発射機構で相手および中央ポールを狙います. -
-
足回り 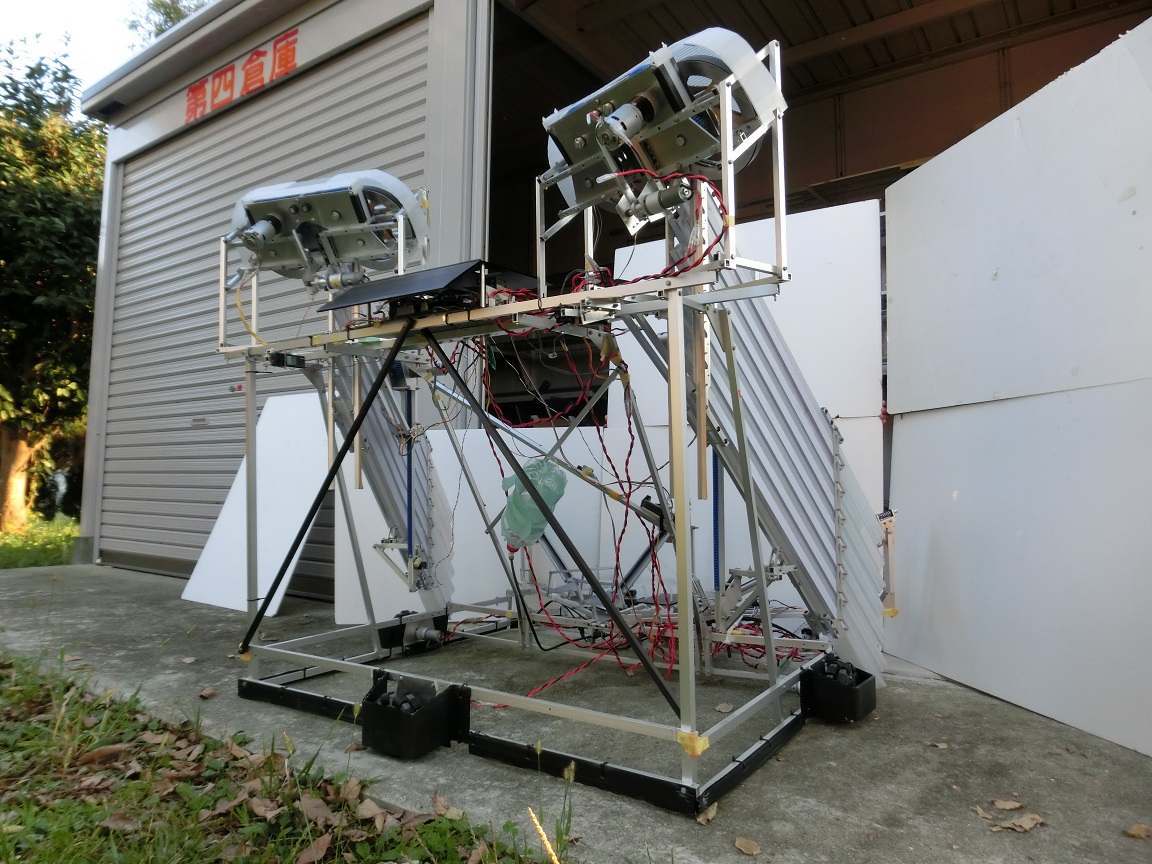
素早く4方向に動き回れるようにオムニホイールを採用しました.
これにより,位置調整のために壁にロボットを押し付けながら移動が可能になります.つまり,常に壁と平行になります.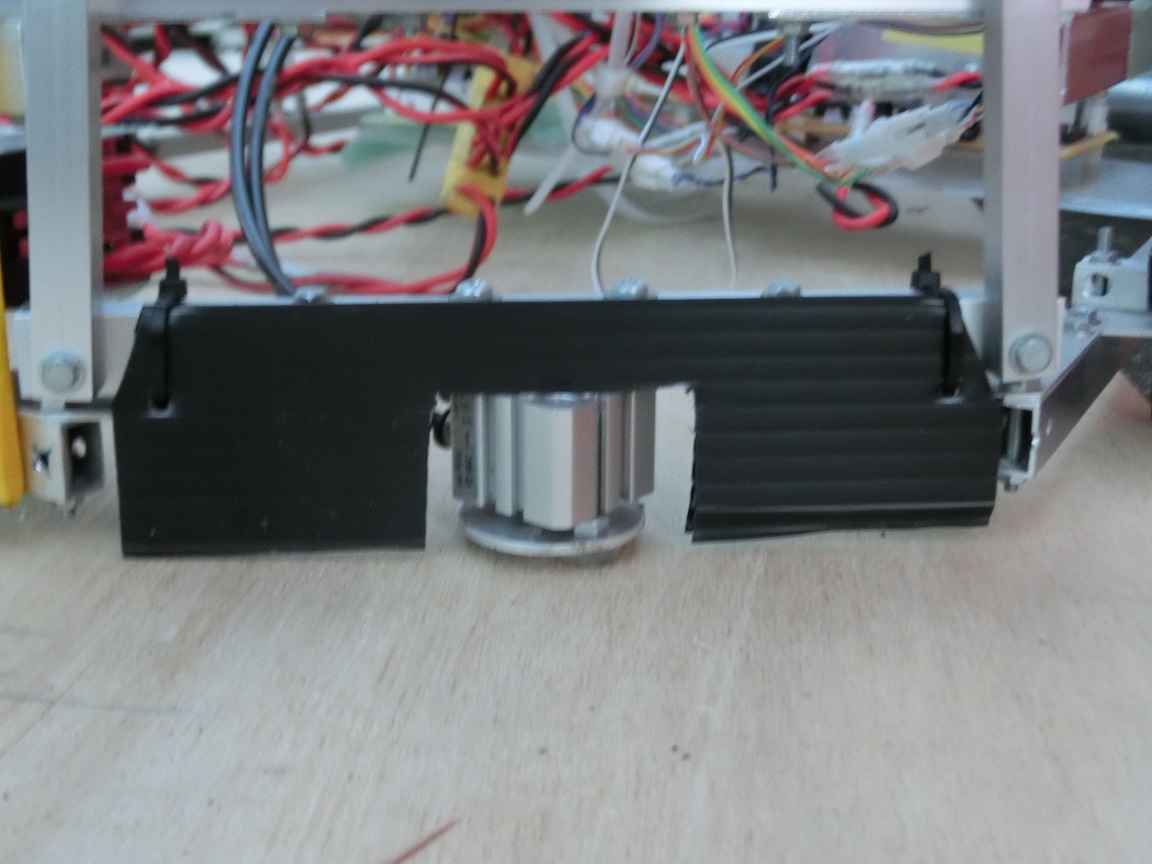
また,後程紹介する自陣側の発射機構の衝撃緩和のためエアーを用いたストッパーもロボット後方に2か所取り付けています. -
自陣側発射機構 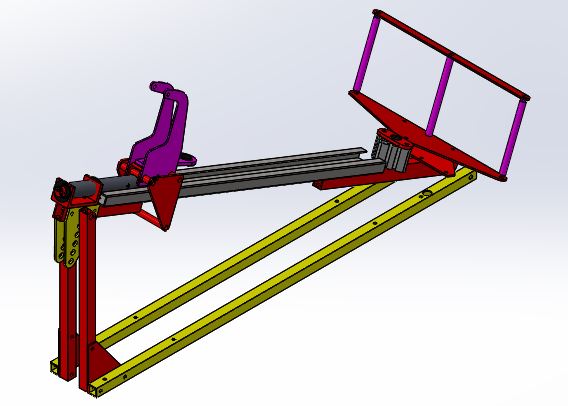
ゴムの弾性エネルギーを用いた発射機構です.
輪をコの字の折り曲げて装填し,エアシリンダーのストッパを解除すると発射します.
ゴムの力の影響は大きく,また,3方向同時に発射するため発射時の衝撃で位置がずれてしまうほどでした. -
相手側発射機構 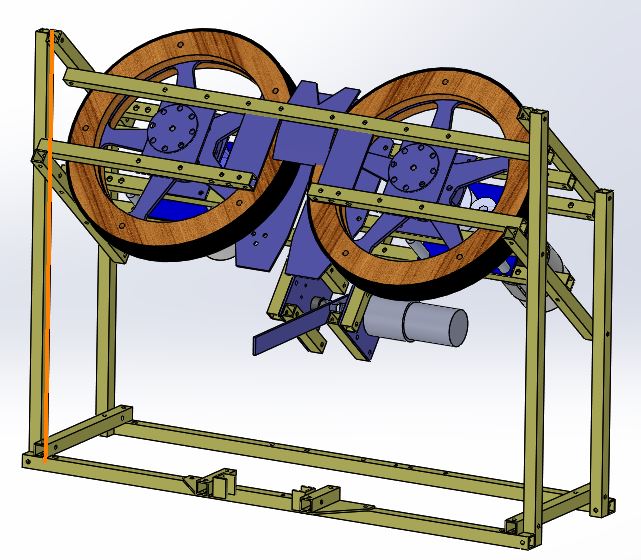
高速回転するローラの力で輪を送り出す発射機構です.
輪を打つときは,爪を回転させそれに輪をひっかけてローラーへと送り込みます.
また,PID制御によりローラーの回転数を制御することで相手側,中央側の切り替え,微調整を行います.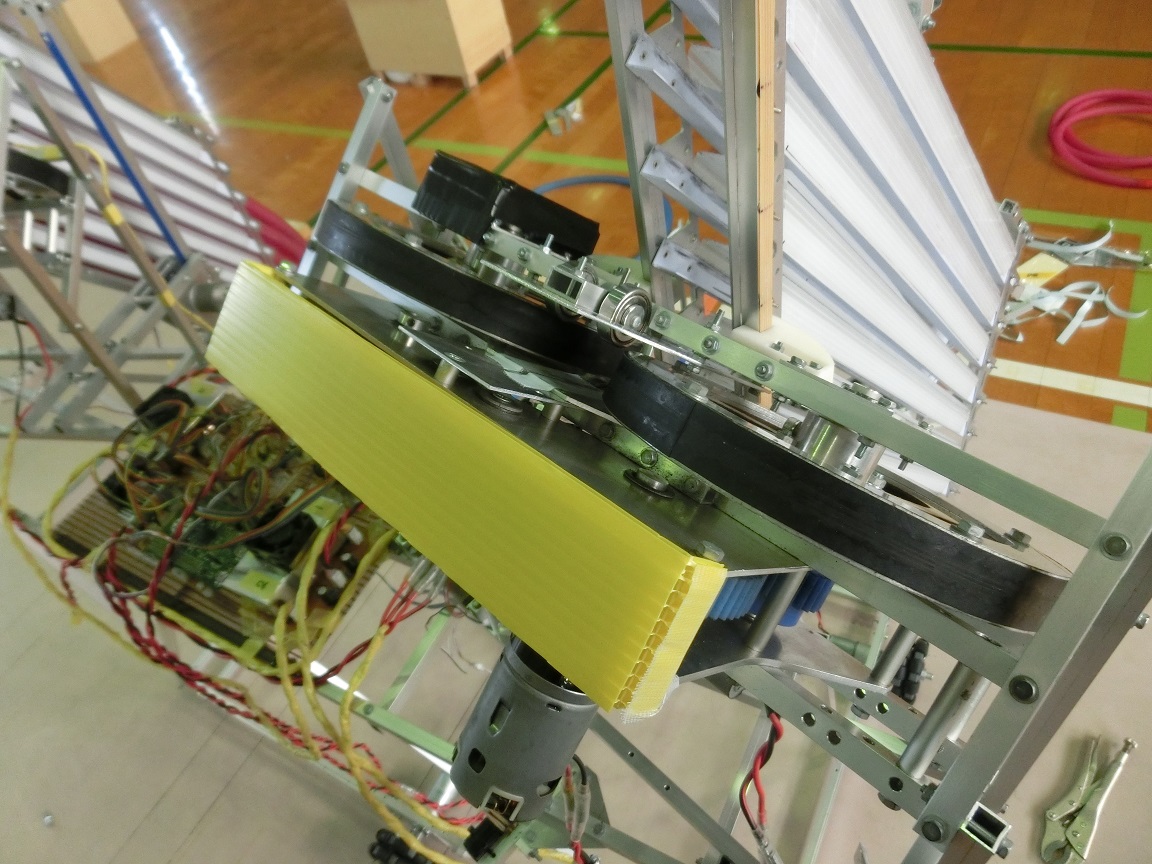
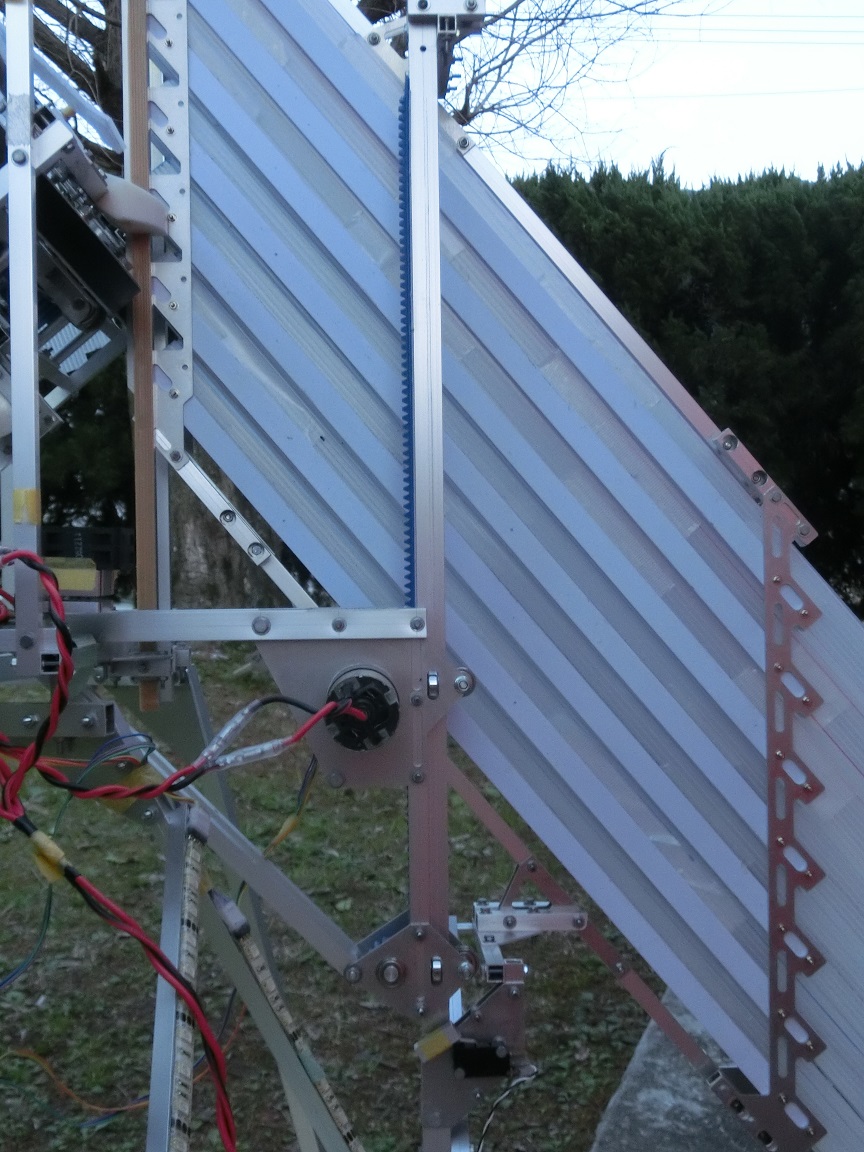
装填機構は四角い筒状のものをエレベータのように上下させて行います.
エレベータの制御ですが,1段ごとに微妙に位置合わせが異なります.
制御担当者は,大変苦労しました.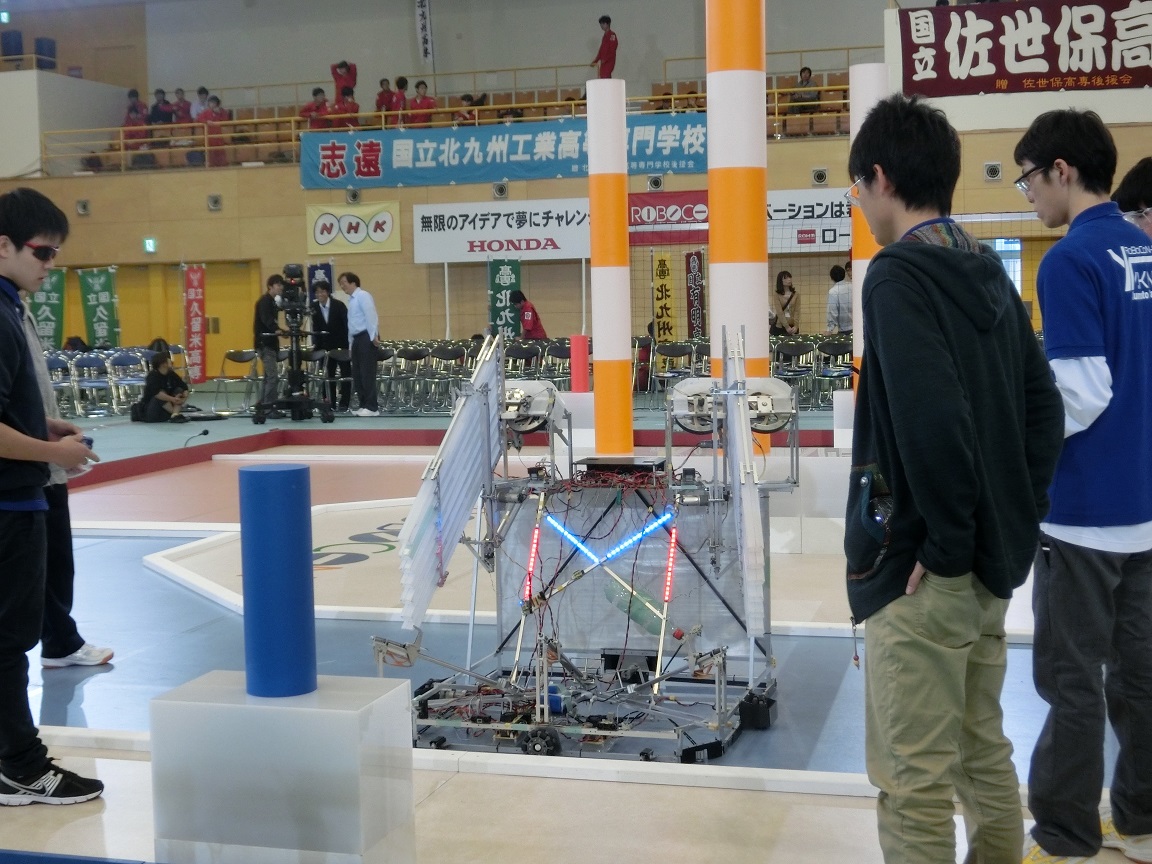
後ろについているテープLEDは色によってどこを狙うための回転数なのかを,操縦者が一目でわかるようにしています. -
回路・プログラム 
マイコンはSTM32 F3 DISCOVERY,IDEはIAR Embedded Workbench,言語はCを使用しました.
マイコンボードを2枚使用しています.
1枚は足回りと自陣側の発射機構の制御,もう1枚は,相手側発射機構の制御を担当です.
回路担当者が複数人いるので,ロボットの担当箇所で分担しています.
モータードライバ回路の大きな変更点はありません.
PSDセンサーを2つ使って,スタートから自陣側ポールの位置合わせを自動で行います.
具体的には,ポールを通過したかどうかを距離で判定します.
バッテリーは,回路用にHyperion LiPo 3S 11.1V 45C 1100mAh,
モーター駆動用にHyperion LiPo 5S 18.5V 45C 2600mAhを2本使用しています.
ローラー部のモータの消費電力が尋常じゃないので,駆動用は2個搭載しました.
コントローラは,Dualshock3とその専用モジュールのSBDBTを使用し,Bluetoothで無線通信を行っています.
八代ロボコン部で初めての導入となりました.
-
{kind=link}