Challenger

しかし,練習しているうちにVゴールのタイムが向上したので,優勝を目指すようになりました.
地区大会では,接戦の末,準優勝に終わりましたが審査員推薦で全国大会に出場しました.
全国大会では,1回戦敗退で終わると思いきや,ワイルドカードに選出され,ベスト4まで進出しました.
1回戦と準決勝戦では,香川高専高松キャンパスと対戦し,2敗する珍しい出来事になりました.
また,特別賞(東京エレクトロンFE株式会社)を受賞しました.
大会中のVゴール最速タイムは,51秒です.
練習中は40秒を出すこともありました.
- 挑戦"車"「Challenger」
-
モチーフは戦車です.
アイデアシート等では直接指摘を受けていませんが,地区大会のテストランで指摘を受け,一晩で「カメレオン」に変身しました.
自主規制とまではいきませんが,全国大会では,ロボット名を読み方はそのまま「チャレンジャー」で表記を「挑戦車」から「Challenger」に変更しました.
「挑戦車」の由来は,
・八代Bチームとして,今年こそは,全国に挑戦(challenge)
・超すごい戦車
を掛け合わせたものです. -
-
射出機構 
輪の射出は自作ローラーを使用しました.
輪を飛ばすためには,ローラーの上についているツメを回すことで,輪をひっかけてローラーに送ります.
制御面では,バッテリーの状態で輪の飛距離が変化しないように,PID制御を採用しました.
これは,輪の射出後,素早く回転数を戻すためにも役立っています.
メカの方でも,精度を向上させるために,輪が通る部分にベアリングを取り付けるなどの工夫を行いました. -
角度調整 
輪の飛ばし方の自由度を向上できるように,射出角度が変更できます.
ラックを出し入れすると,リンク機構で射出角度が調整できます.
エンコーダを用いているため,決まった角度に設定することができます. -
旋回機構 
砲台に回路やPC,バッテリーを載せていたため重量が大きいです.
そのため,平歯車では慣性で振り回されるのでウォームギアを使いました.
回転速度が遅いので,画像処理でポールを追従することができました. -
足回り 
モチーフの戦車からイメージされるクローラーを選択しました.
クローラーは,こちらも初めての挑戦だったので苦労もありました.
特に,旋回時にベルトがずれてしまう問題があり,改善に時間がかかりました.
ただし,クローラーにすることで,輪が散らばっていても安定して乗り越えることができます.
地区大会では黒一色のベルトでしたが,全国大会では目がチカチカするほどカラフルなレインボーロードになりました. -
補給機構 
かっこいいという理由でリボルバー式の補給機構にしました.
この機構を製作し,初めて射出したときはポールに輪が全く入りませんでした.
しかし,2015年8月16日(日)にとある部員によって考え出された輪の入れ方によって,ポールに輪が入るようになりました.
試合では,セッティングタイムの1分間に選手とピットクルー総出で輪を入れます.
地区大会では,試合中の輪の補充で時間がとられる問題がありました.
全国大会では,ロボット全体を軽量化し,リボルバー2台体制になりました. -
外装 某インク縄張りバトルアクションシューティングゲーム, Splatoon(スプラトゥーン)に影響を受けたわけでは決してありません.
ロボットの外装は,当初,本物の戦車のように迷彩柄にしようとしていました.
しかし,本物の戦車に似せると怖いという意見もあり,地区大会1週間前に現在のデザインに刷新されました.
自分たちの手形でカラフルにし,リボルバーには絵の具をびちゃびちゃに飛び散らしました.
リボルバーの装飾で1つ5時間ほどかかっています.

-
画像処理 八代ロボコン部は,2012年から画像処理を取り入れ,2013年も採用し,2014年は採用していません.
いつか,画像処理が日の目を見ることを信じて,とある部員が継続的に勉強していたこともあり,2015年に採用されました.
今回は,Kinect V2を使いポールを認識しています.
IDEはVC++2013,ライブラリはOpenCV,Kinect V2 SDKを使用しています.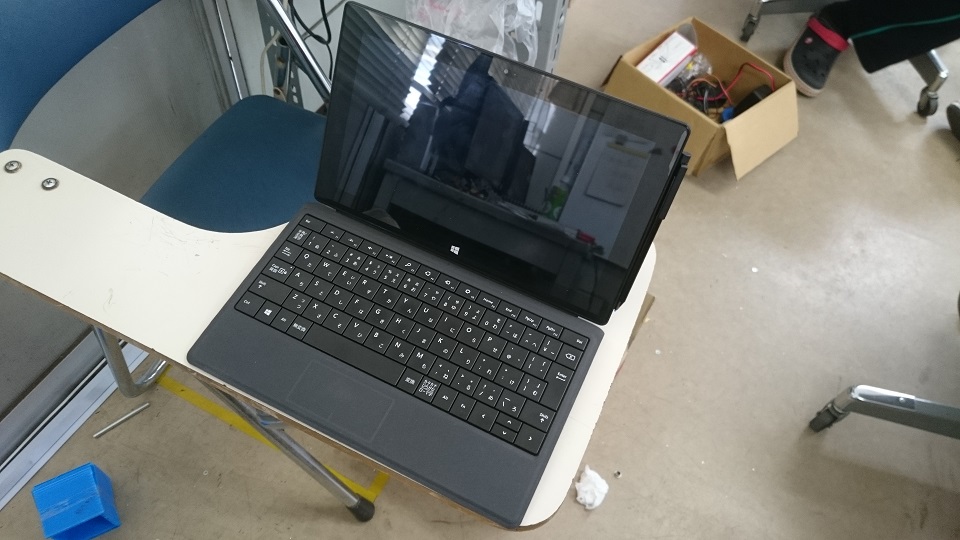
使用したPCは,Microsoft Surface Pro 2です.
シーズン中はずっと部員個人のものを使っていました.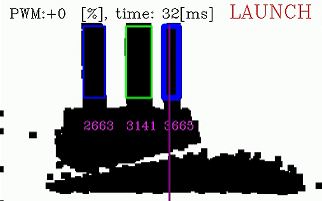
アルゴリズムとしては,カメラの視野範囲でポールがあれば,自動的に照準を合わせます.
そこから,ポールの種類と距離からローラーの角速度,砲台の角度を自動で調整し,操縦者のタイミングで射出しています.
また,相手ロボットにカメラの視界を遮られるため相手側のポールは認識していません.
そのため,自分側のポールと中央ポールだけ認識できるようにしました.
ちなみに,Kinect V2に対する外乱光の影響を調べるために写真のような実験をしましたが,問題ありませんでした.
パッシングしたり,ウインカー連打したり….
時には誤爆してワイパーやクラクションも連打したとかそうでないとか….
なお,奥の建物は寮です. -
回路・プログラム 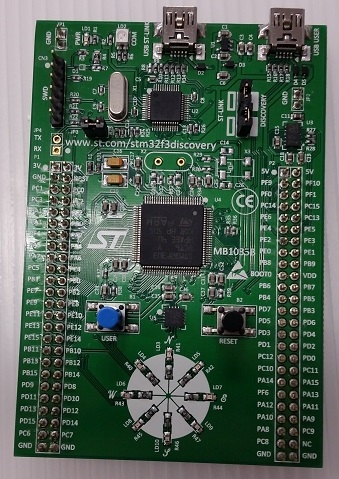
マイコンはSTM32 F3 DISCOVERY,IDEはIAR Embedded Workbench,言語はCを使用しました.
マイコンとKinect V2の通信は,XBee Series1 Proを使用しています.
なお,人数不足もあり,この年の回路設計から製作,マイコンプログラミングは2年生1人が担当しました.
モータードライバ回路は,大きな変更点はありません.
画像処理の結果を選手たちにわかりやすく示すため,2014年に引き続きテープLEDを活用しています.
バッテリーは,回路用にHyperion LiPo 3S 11.1V 45C 2600mAh,
モーター駆動用にHyperion LiPo 5S 18.5V 45C 2600mAhを使用しています.
また,Kinect V2の電源は,既存のケーブルを改造して,回路の電源からとりました.
コントローラーは初採用となるDUALSHOCK3を使用しました.
DUALSHOCK3の通信はBluetoothで行っているためSBDBTという通信モジュールを使用しました.
全国大会ではたくさんの観客が無線を使用していたせいかペアリングにやたらに時間がかかる現象が発生しました.
学校での練習時や地区大会ではそんな現象は発生しなかったのですが….
-